Now that the movable base of the arm is completed, it’s time to build the span of the arm so that it can reach the ground from the base of the robot. We’ll also add in the servo for the end effector.
*Note: If you plan on driving your Bowie around a lot (who wouldn’t?) we recommend blue thread lock on the fastener threads. It’s possible some pieces may require sanding.
Fasteners required
- 18x M3 10mm
- 2x M3 16mm
- 20x M3 washers
- 20x M3 hex nuts
Supplies required
- Hot glue
Pieces required – Check out the pieces page for what to print! (Coming soon)
If you ever need a to see what you are working on, feel free to go back to the splash page, where there is an interactive 3D model viewer there.
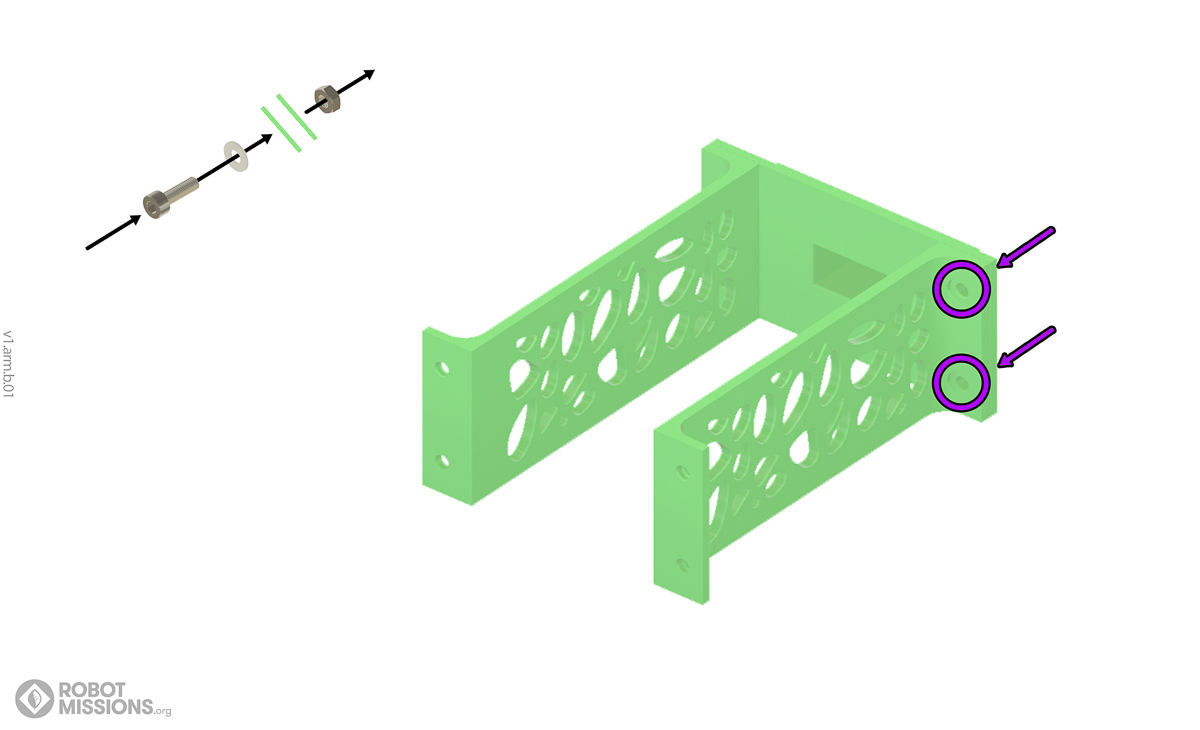
Lay out the dovetail M piece and two long arm pieces as shown. Fasten one side of the long arm piece to the dovetail M piece with 2 x M3 10mm screws.
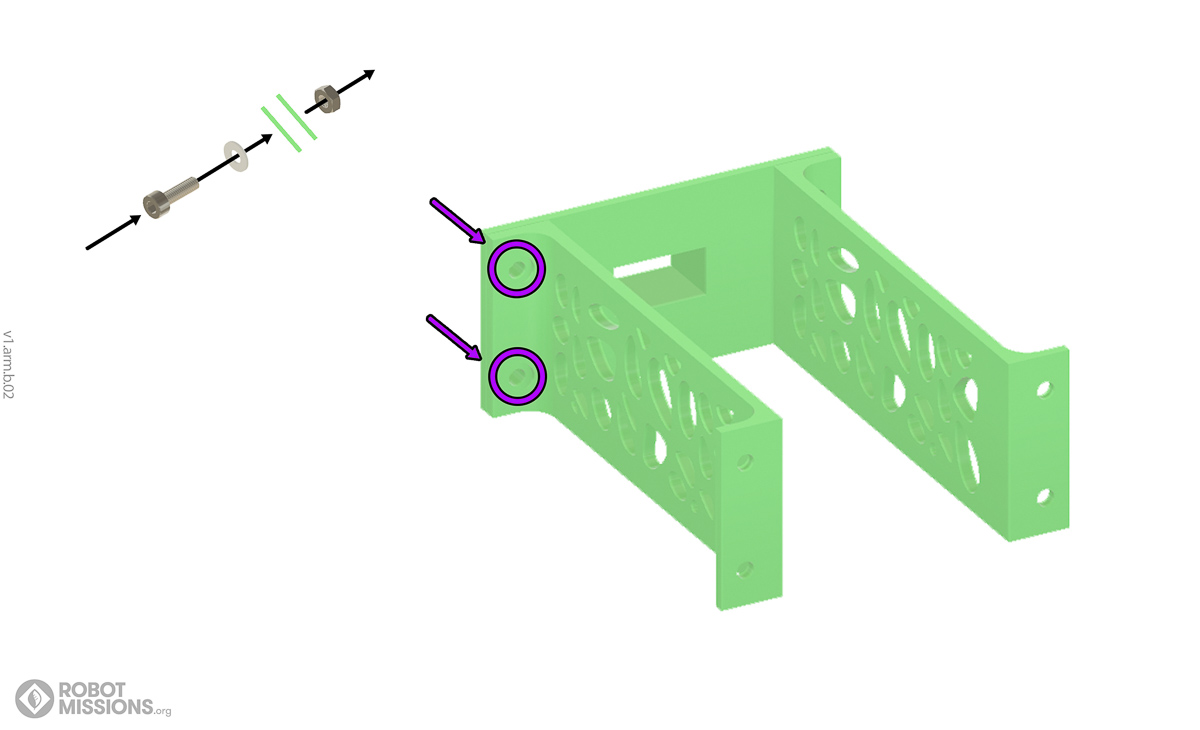
Do the same for the other side, also with 2x M3 10mm screws.
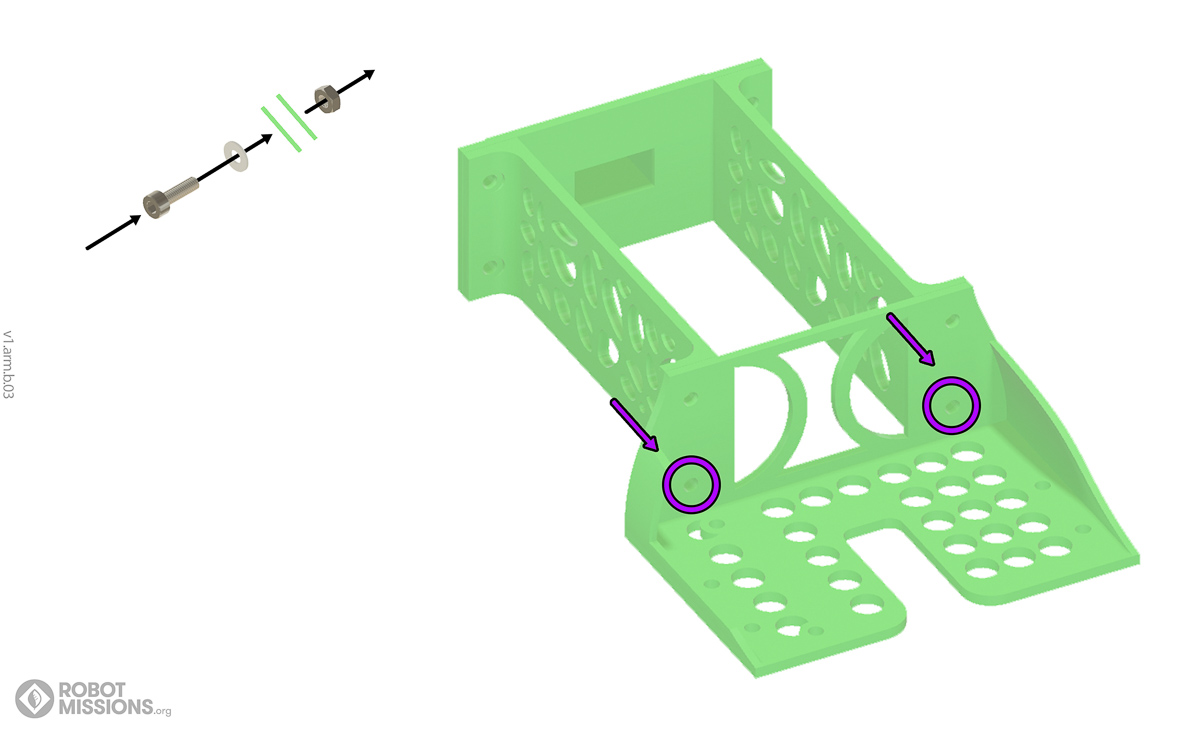
Now add the end effector mount. Fasten it to the end of the long arm pieces with 2 x M3 16mm screws.
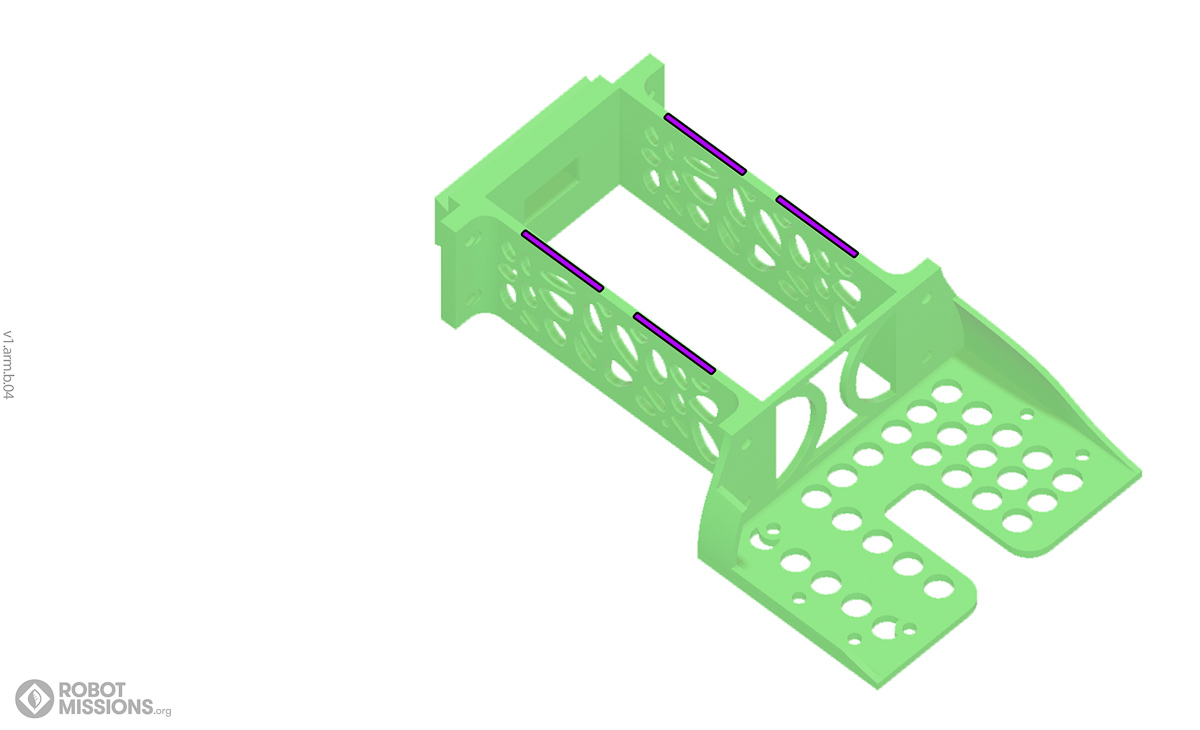
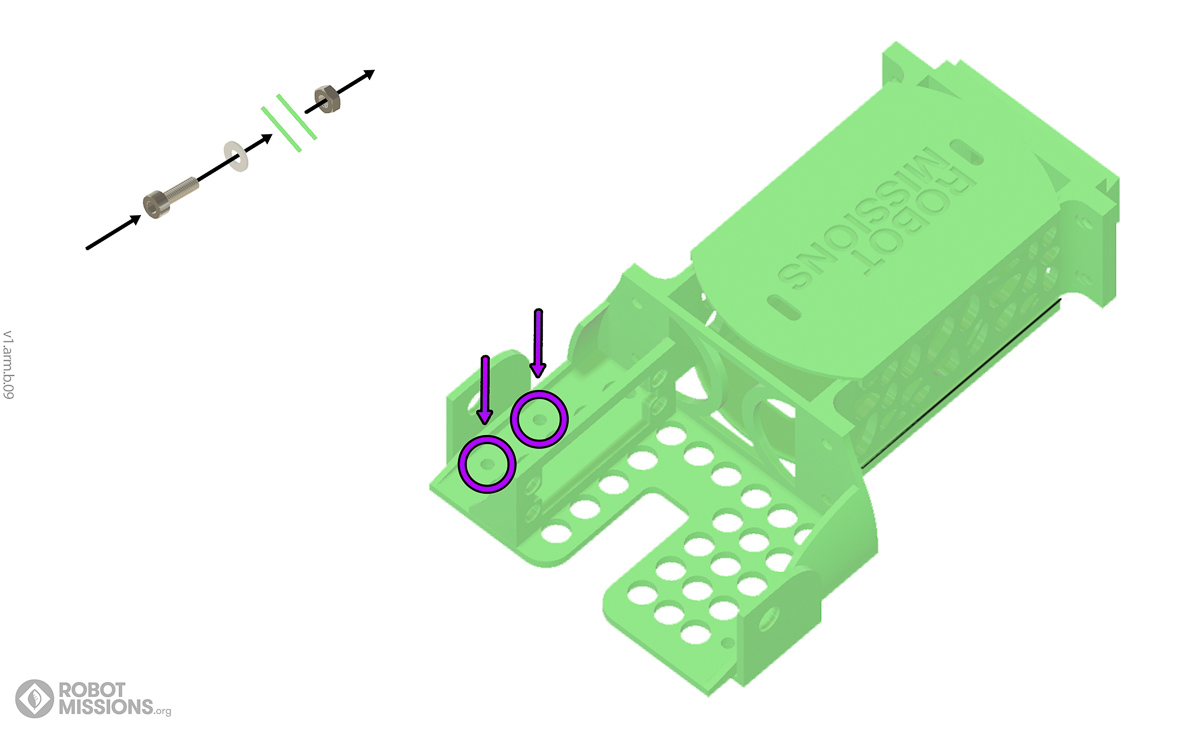
Heat up your hot glue gun and have the Robot Missions plate shown below ready. Glue along the purple lines indicated above.
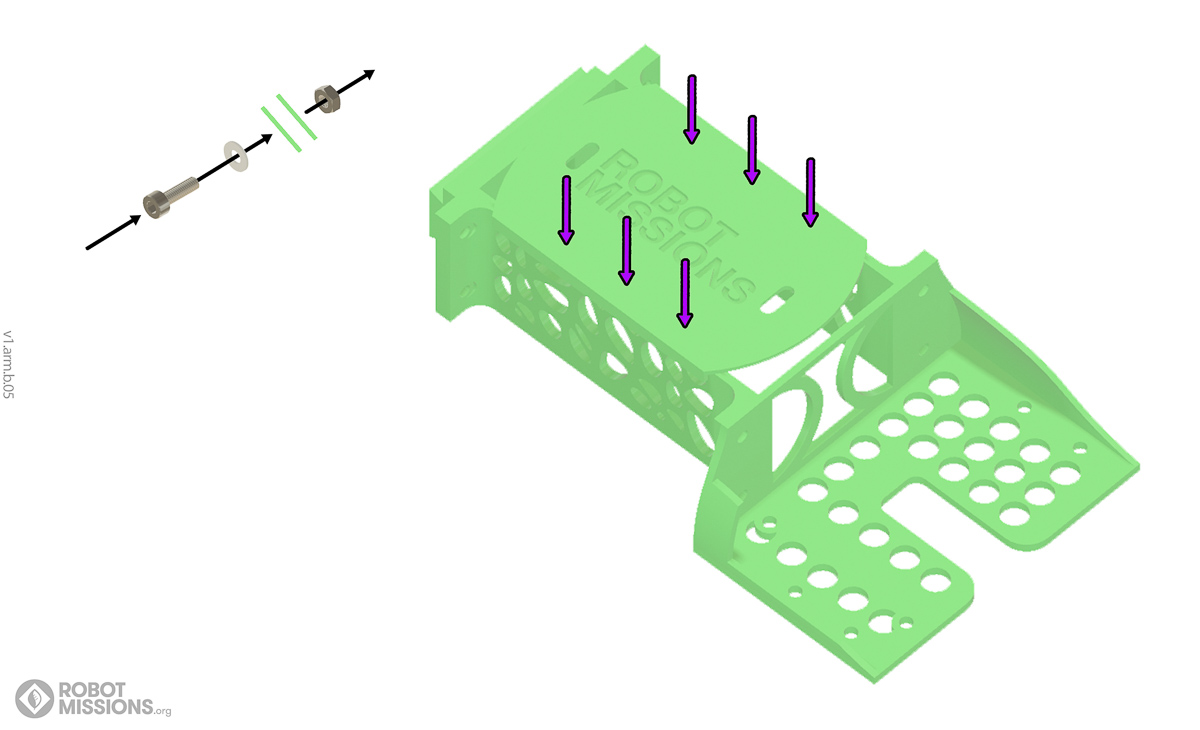
Press the plate down firmly on the hot glue. Allow the glue to cool. Keep your glue gun plugged in for the next step though!
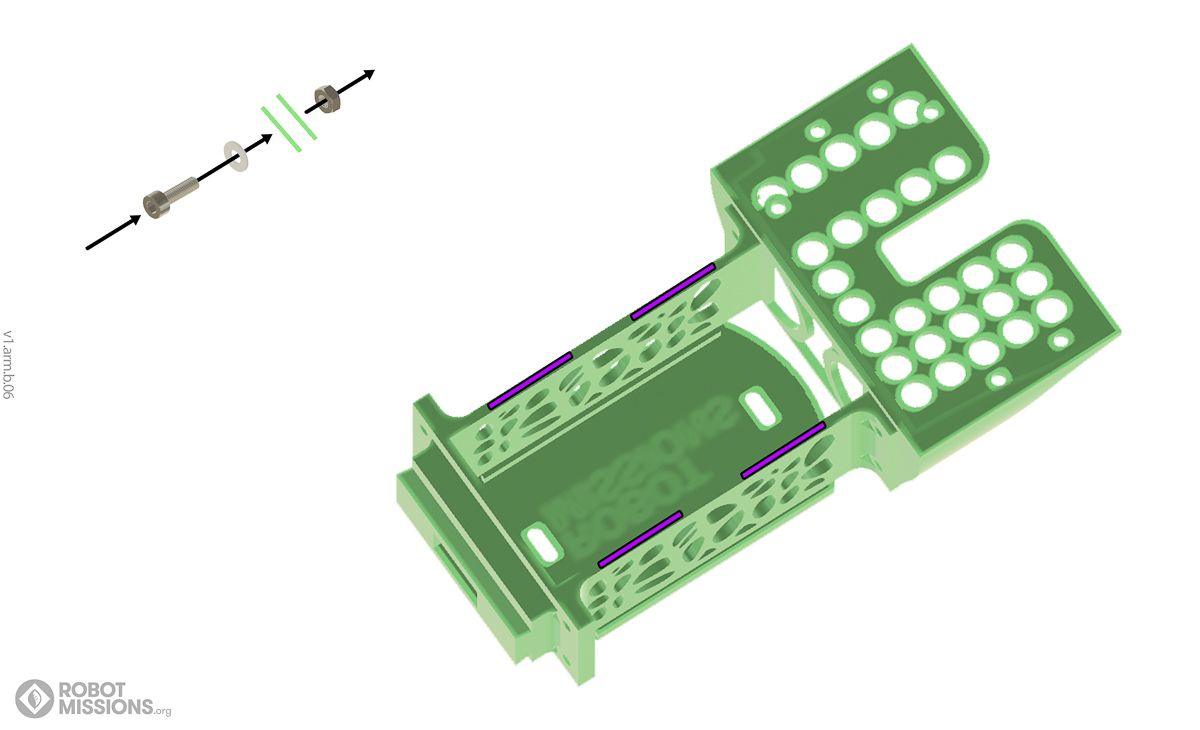
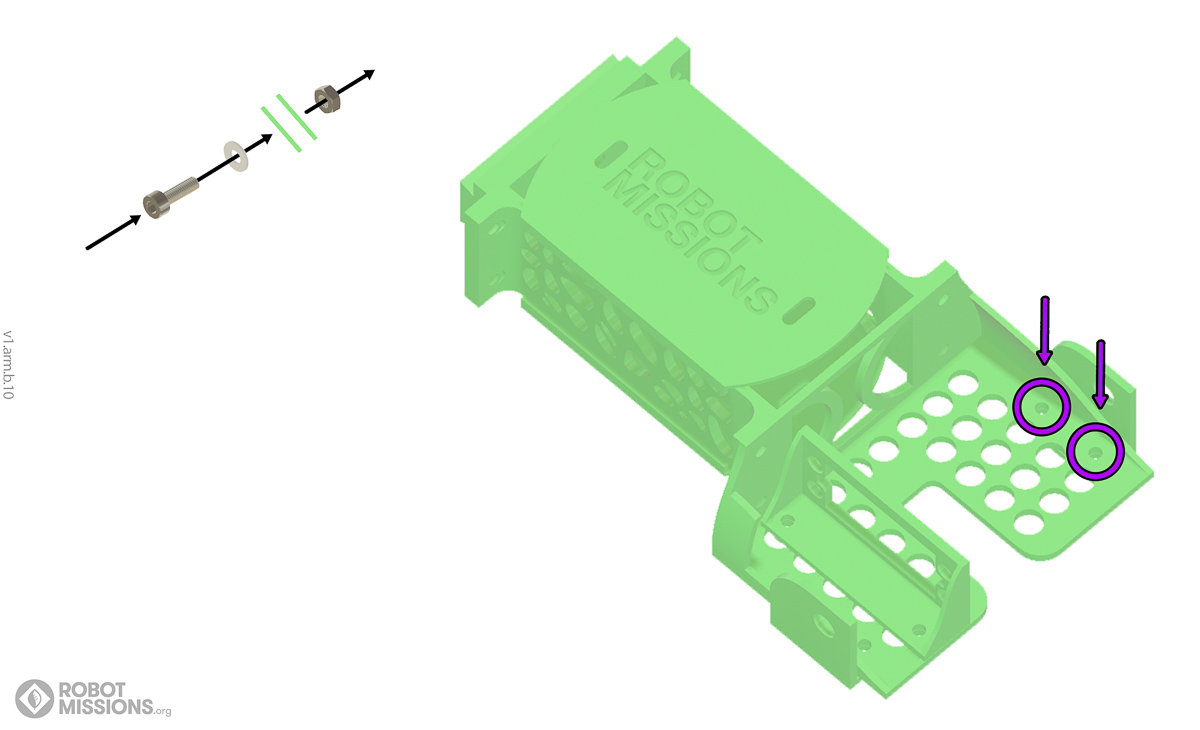
Next, do the same for the other side. Have the plate ready at hand. Glue along the above indicated purple lines.
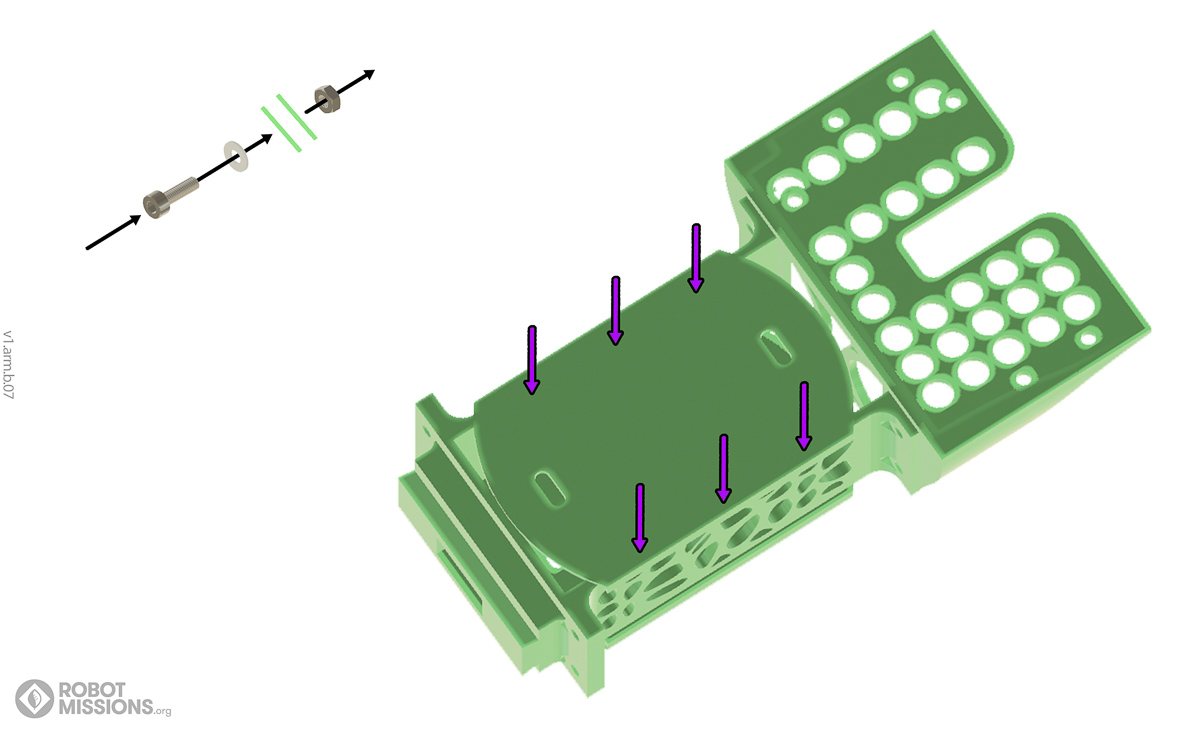
Press the plate down firmly on the hot glue. Allow the glue to cool.
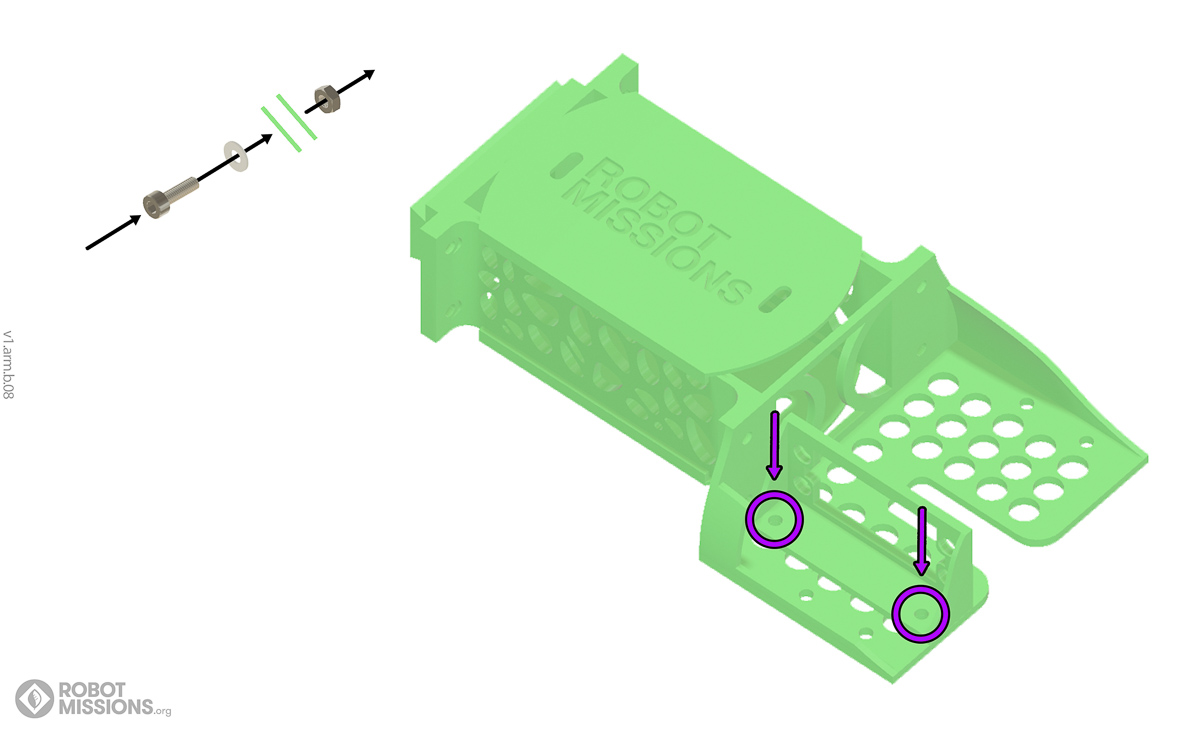
Attach the servo mount end effector to the end effector mount using 2 x M3 10mm screws.
Fasten the left end pivot align with 2 x M3 10mm screws.
Next, fasten the right end pivot align with 2 x M3 10mm screws.
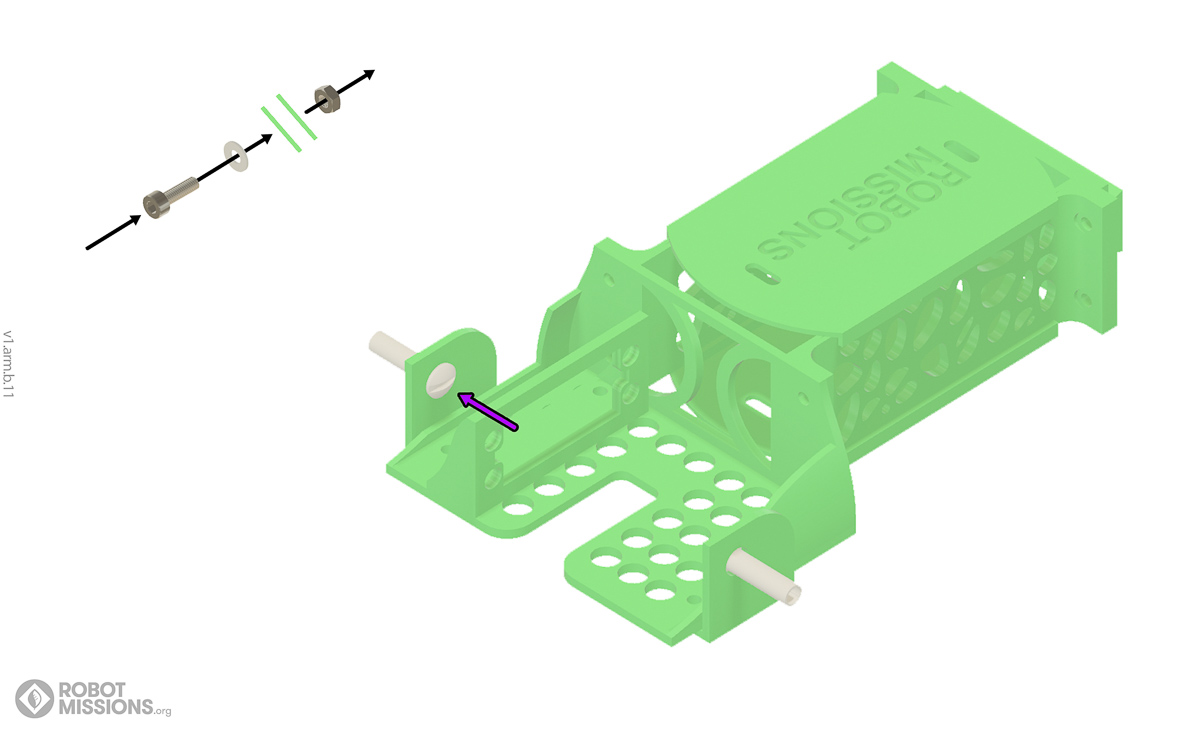
Insert the F end of the binding post into the left end pivot align.
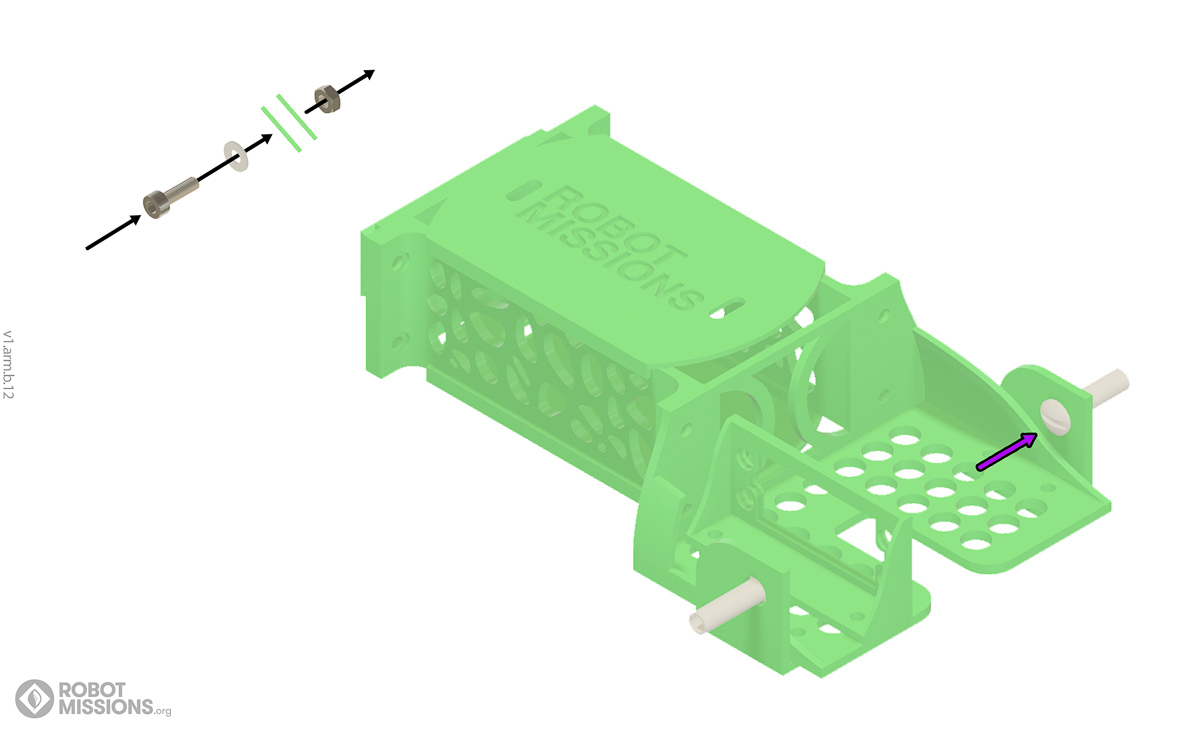
Do the same for the right end pivot align.
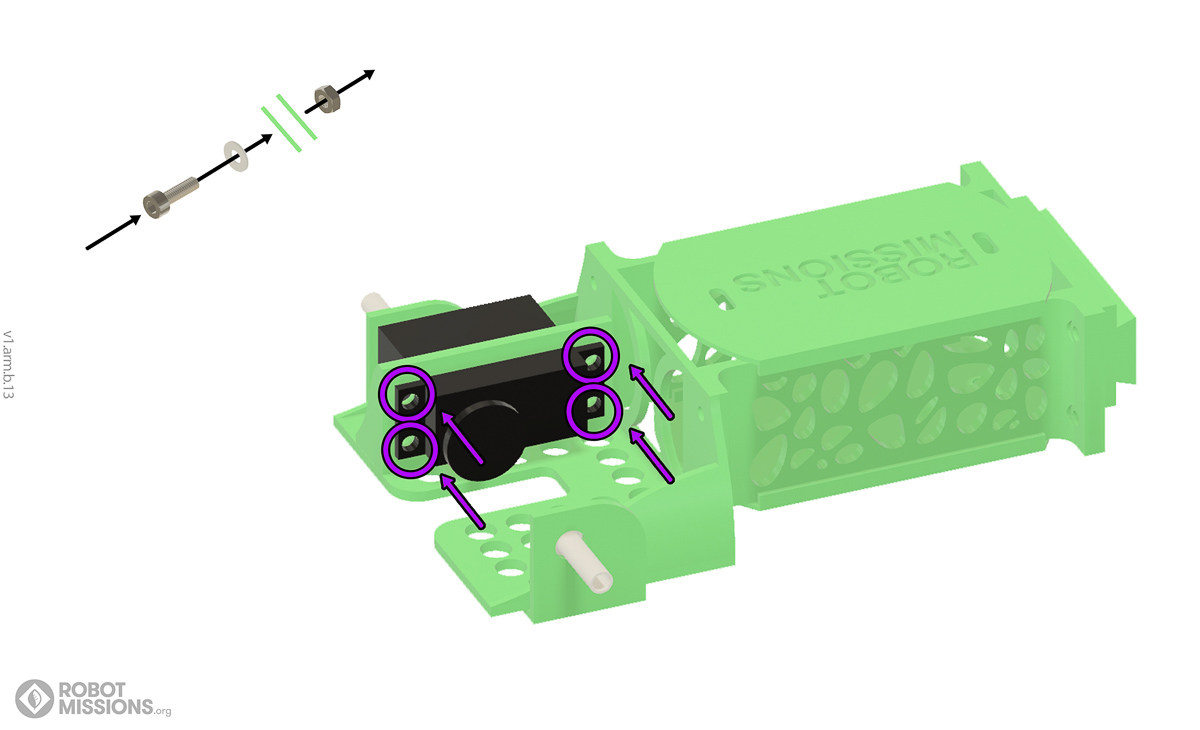
Now, add your servo! Fasten it to the servo mount end effector with 4 x M3 10mm screws. Carefully note the position of the servo in the image above. The servo horn is near the edge of the end effector plate.
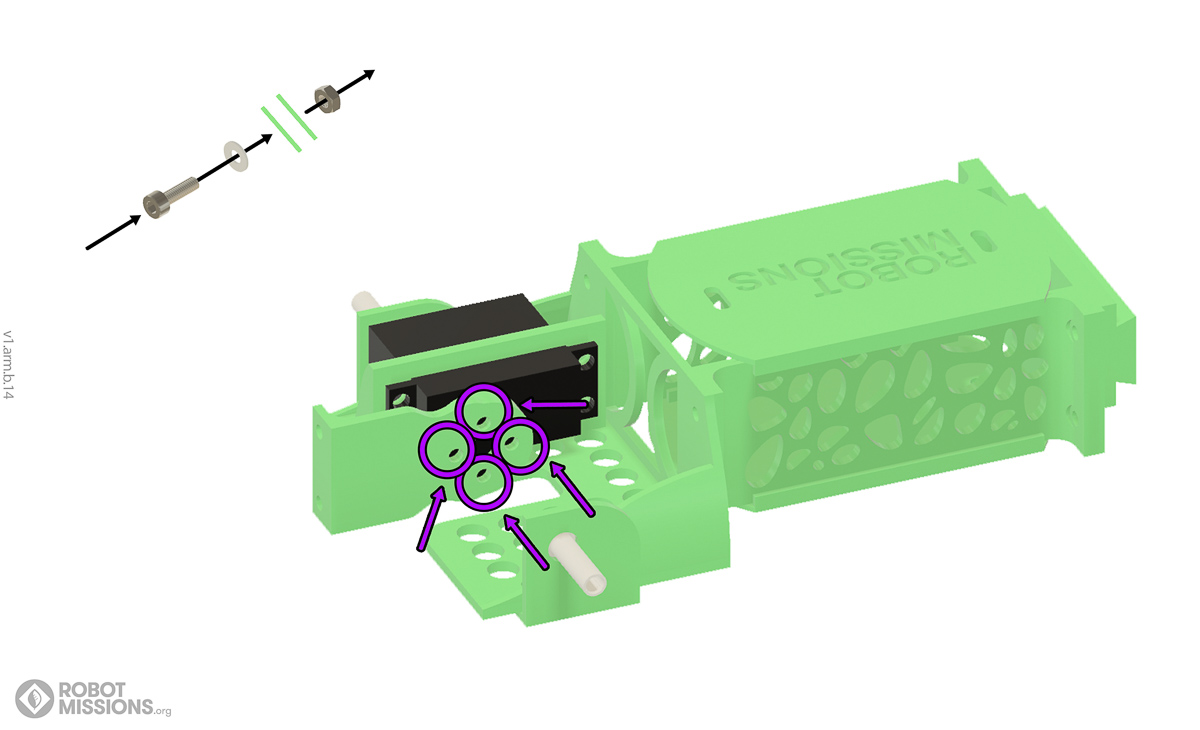
Fasten the servo arm end effector to the servo using 4 x M3 10mm screws.
| ← Arm servos base mount | End effector → |