by Erin RobotGrrl | Dec 4, 2020 | News, Tech Logs
There is a key piece of functionality for the user that is missing from the current AR mode of Terrapulse. That is, the user has to be able to drag and drop something onto the marker – and have an effect, like an animation or something. Eventually this would be used to display more information. Anyway, turns out that implementing this feature is not as straightforward. Spent most of the time searching for Aframe modules that would enable this. There’s one that kind of works, but needs some improvements. This will have to be looked at again tomorrow. Next step is to revisit this and try it again.
by Erin RobotGrrl | Nov 27, 2020 | News, Tech Logs
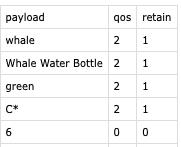
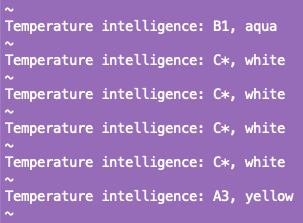
There’s now a program that will listen for all the messages sent to the MQTT broker and log it to a csv file. This is useful to store the data. Right now, the parameters that are saved are simply the date, time since the epoch, topic, payload, qos and retain. It was interesting to see the retained messages on the server be instantly sent when the logger program subscribed to the topics. There is currently one uncertainty with the code, the logger opens and closes the file each time it is being written. Will this become a bottleneck when there will be plenty of messages and a queue forming? It will be interesting to test. For a prototype, it works. The next step was to write the intelligence program. That was simple, and it is complete too. The next step following that is to find the real sensors electronics for the device.
by Erin RobotGrrl | Nov 26, 2020 | News, Tech Logs
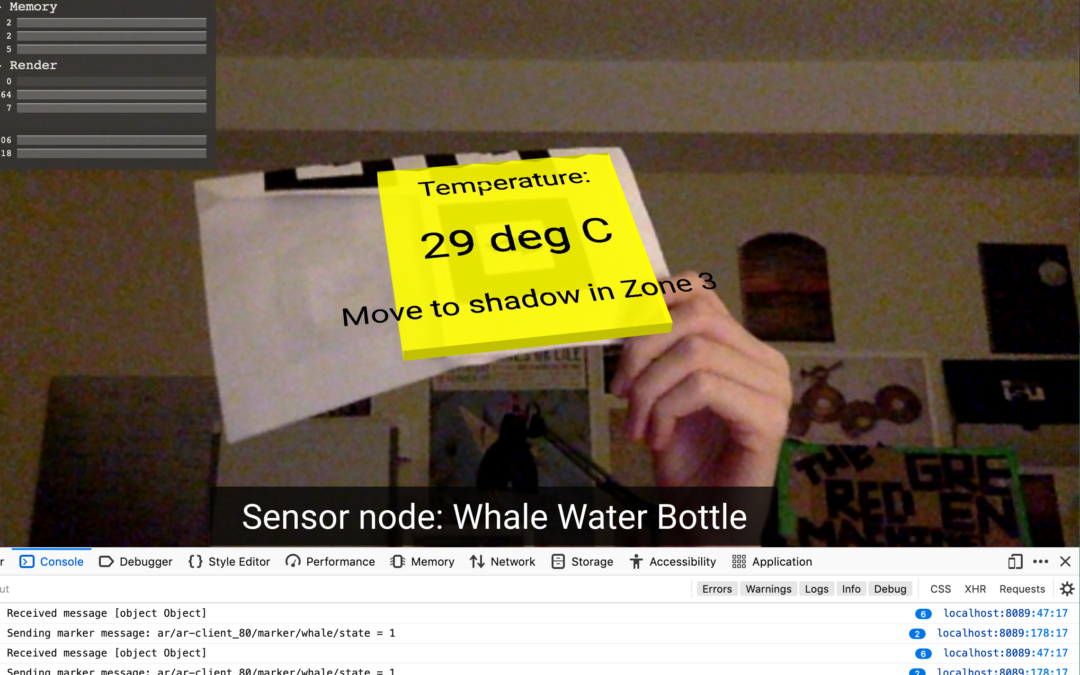
First step of integration between software (AR) and hardware is complete. Now, instead of the device simulator program, there’s an actual device. Using a microcontroller with Wifi connectivity for preliminary testing. The device connects to MQTT, sends sensor data (randomized for now), and subscribes to the relevant topics. For testing in the field, the device will connect to an access point (aka hotspot) from a phone to send the data. Future versions will use a microcontroller with cellular connectivity in the field. The next steps for software are to write a python program that logs all messages on the MQTT broker to a csv file. The next steps for hardware are to find some sensors I have around and add some LEDs, a speaker, and make a board with it. Integration with the map will also need to be completed at some point in the future.
by Erin RobotGrrl | Nov 19, 2020 | News, Tech Logs
The device simulator is now generating values and sending through MQTT. The values get displayed and updated live on the AR marker overlay without glitching. A few days ago making elements clickable was figured out. This will be useful when there’s a need for buttons on the AR view. The topic structure was updated as well. The next step will be to make the device send and receive the data. The AR program is not set up for multiple devices or markers just yet. That will be future work as well.
by Erin RobotGrrl | Nov 16, 2020 | News, Tech Logs
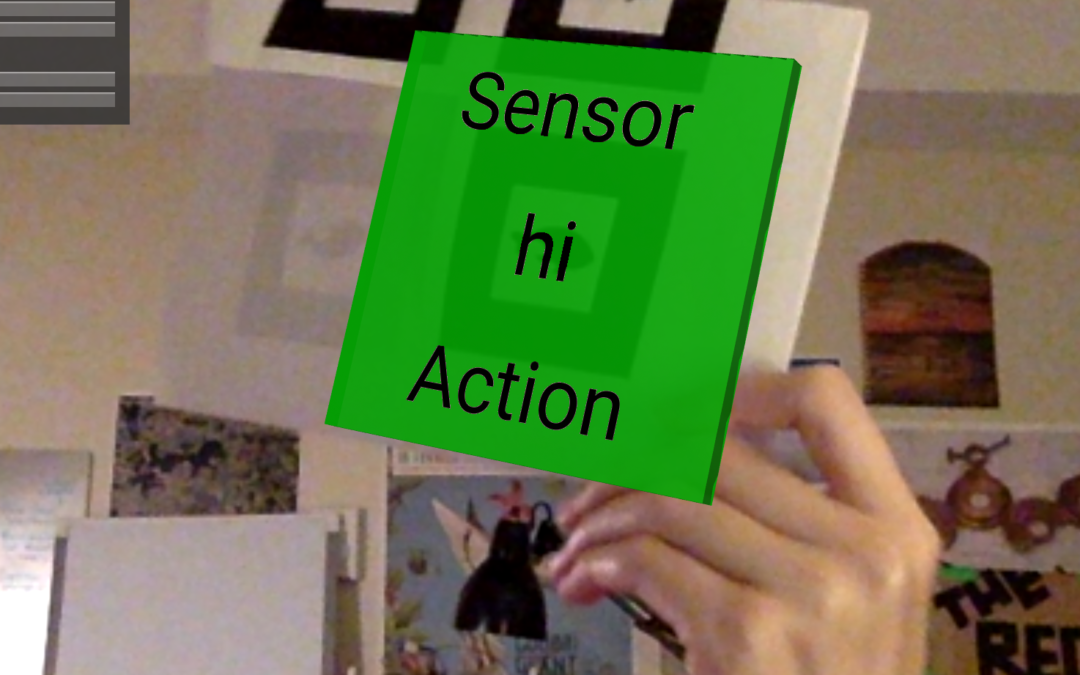
Added the AR overlay to the marker and added the javascript functions to change the text values on the overlay. Updated the system architecture diagram for the latest changes. The next step will be to have the data updated live by the MQTT data. Also, the MQTT connection needs to be fixed again, ha. A few days ago, functionality was added that sends when the marker is in view.

by Erin RobotGrrl | Nov 9, 2020 | News, Tech Logs
AR markers triggering messages to send to the alternate (secure) MQTT server is working. The preliminary topic structure was chosen, which gives each marker type its own topic, and sends the state when it enters the view, still in the view, and exits the view. Next step is to make sure the device can receive these messages, and have the device send its sensor data – only when the marker is in view (as to not overload this MQTT server (since it isn’t running on our AWS)). As well, next step is sending a marker state heartbeat when it is in view.