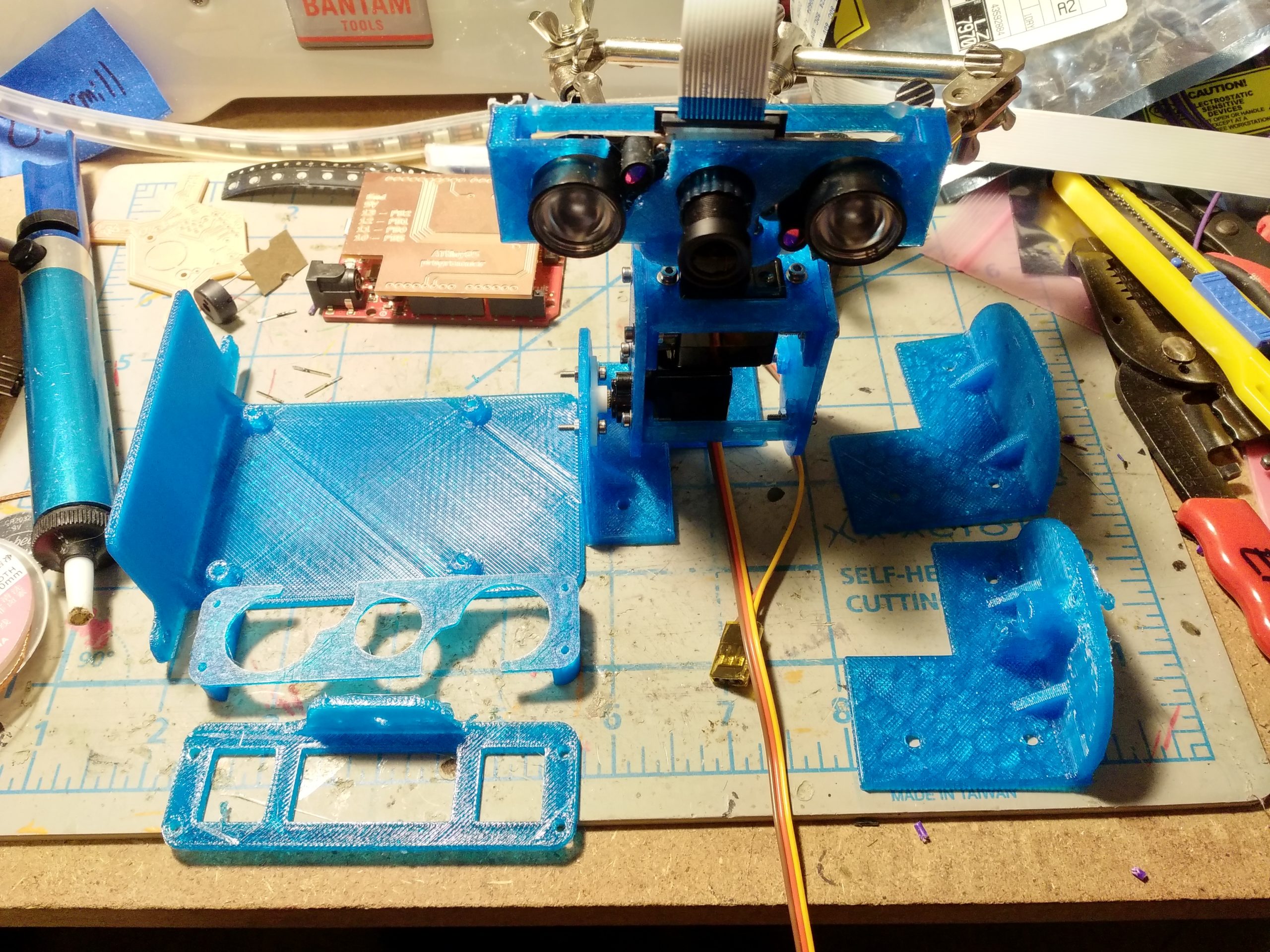
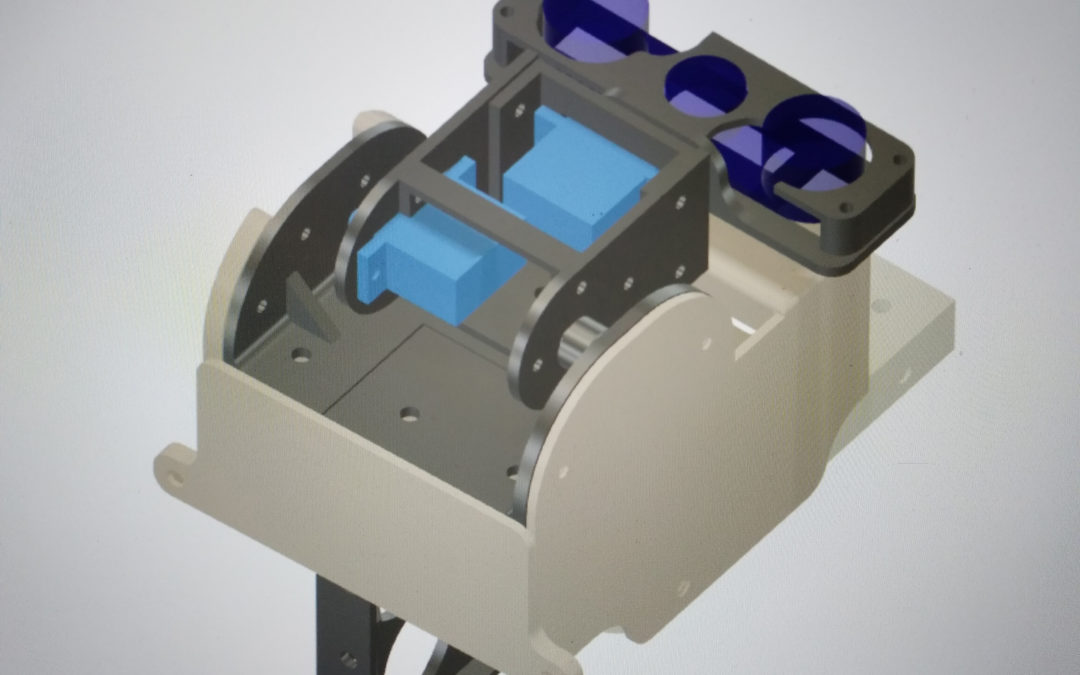
Today we started 3D printing the updated CAD model pieces from the uOttawa group! Just like a teleporter, from their computer to reality over here. It’s great! These pieces will be used to assemble the complete IR camera pieces and mount. The Raspberry Pi goes onto the case and into the shell, which mounts onto the top of Bowie’s chassis.
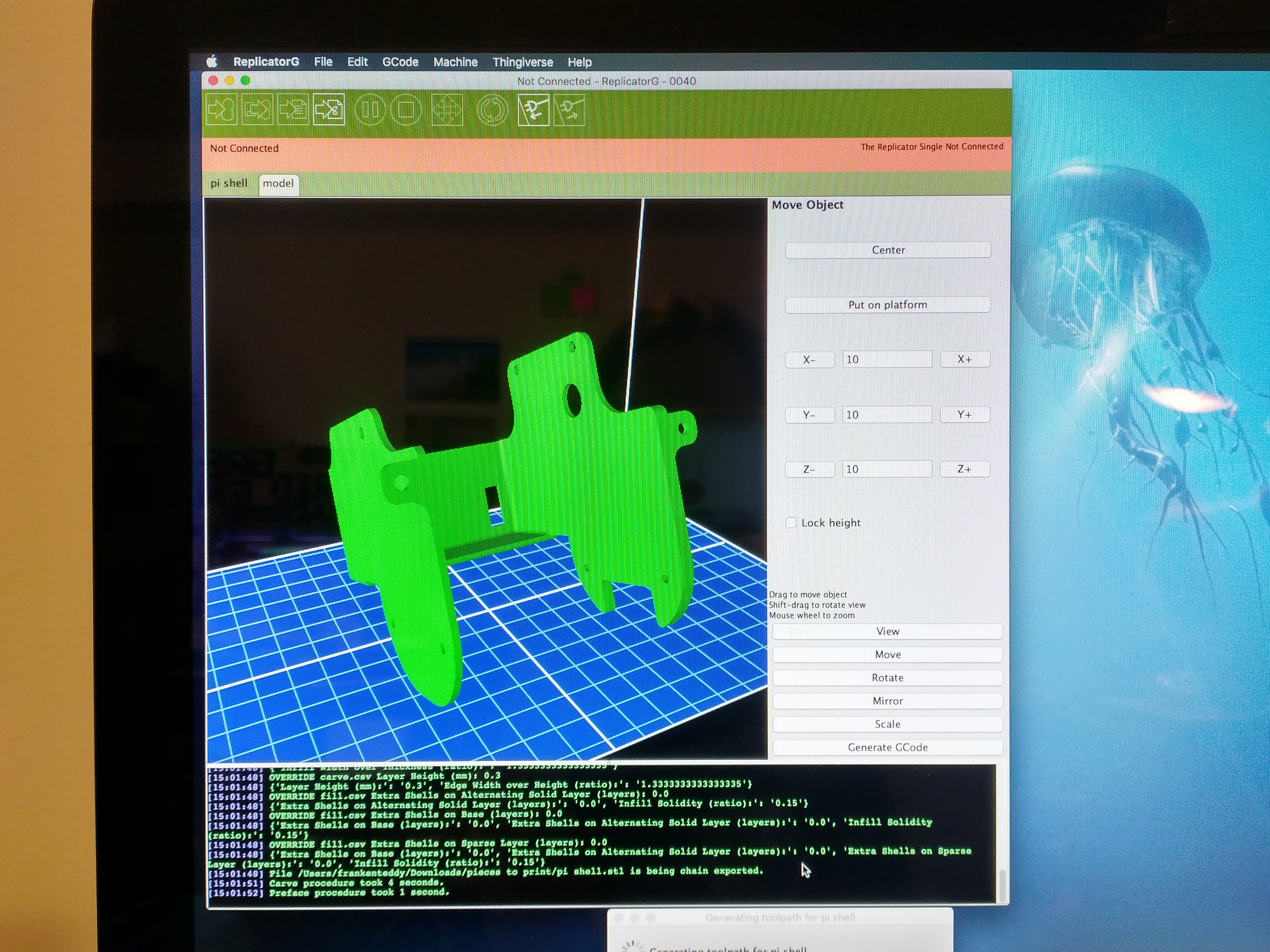
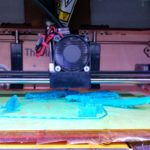
Slicing with the ancient software: Replicator G
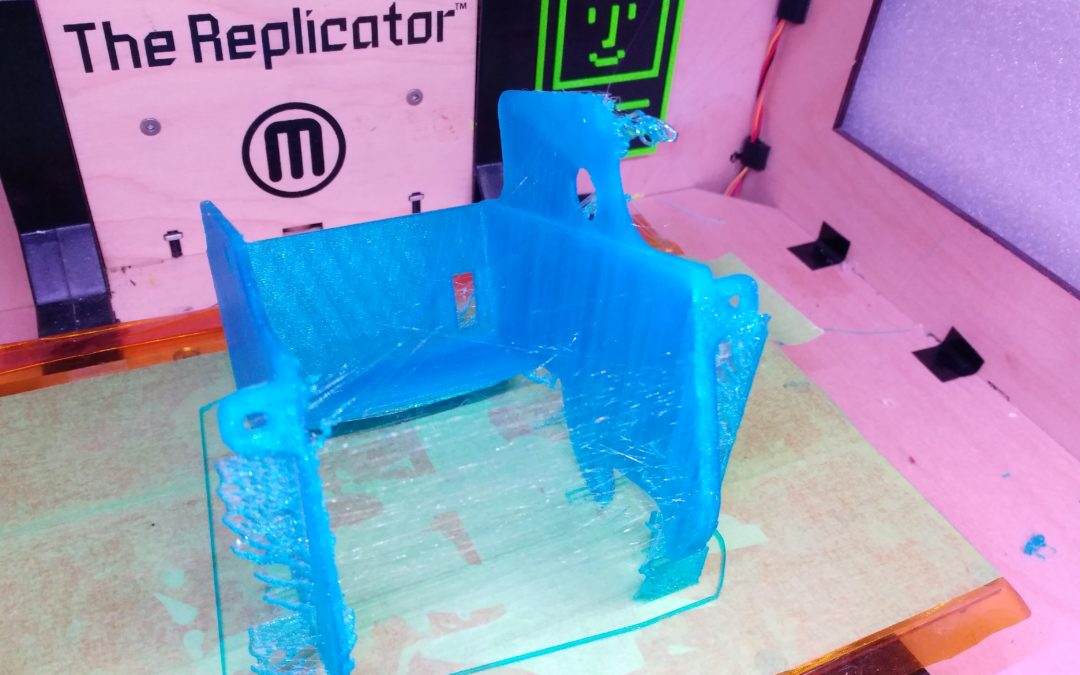
Some warping issues
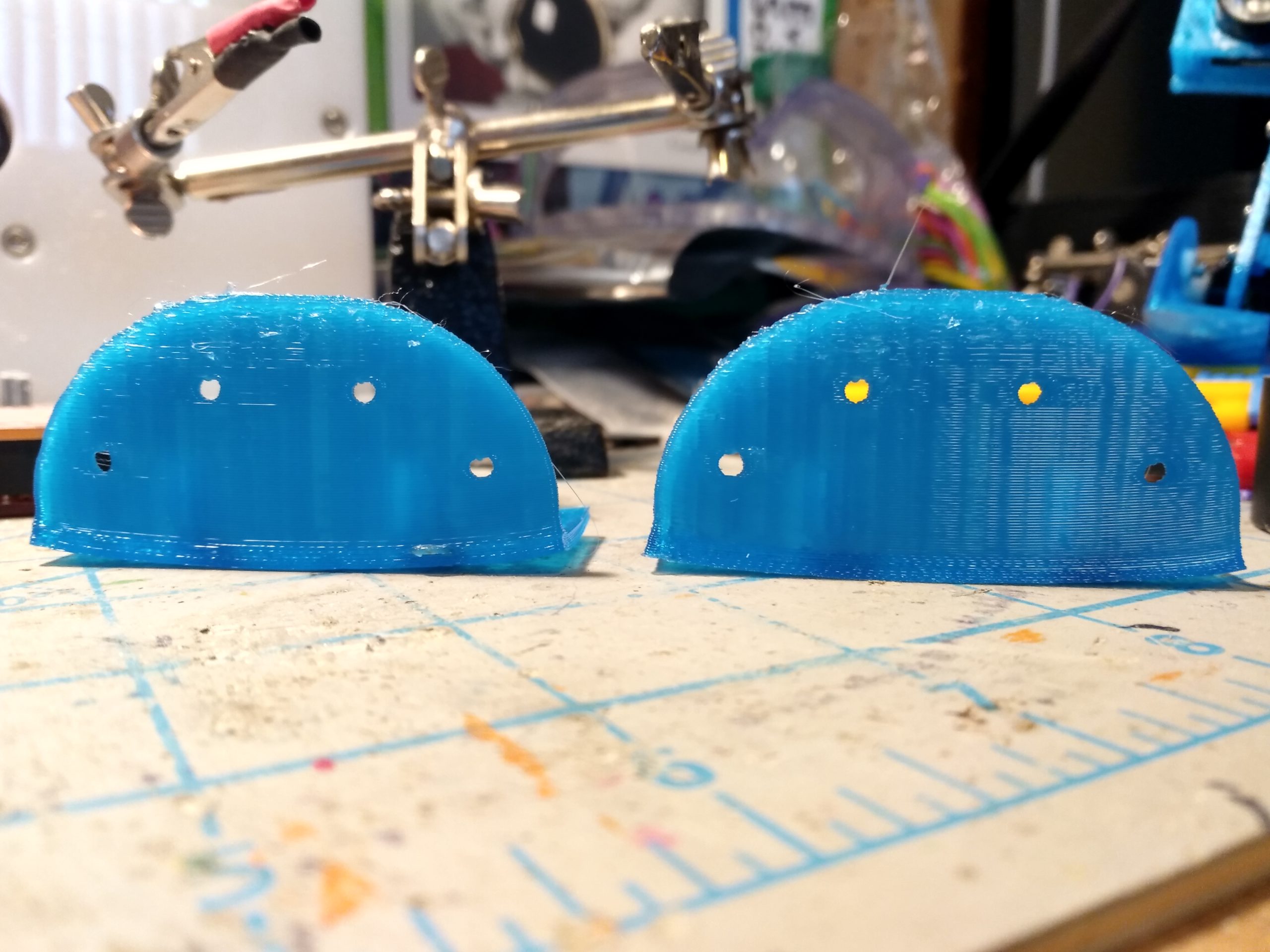
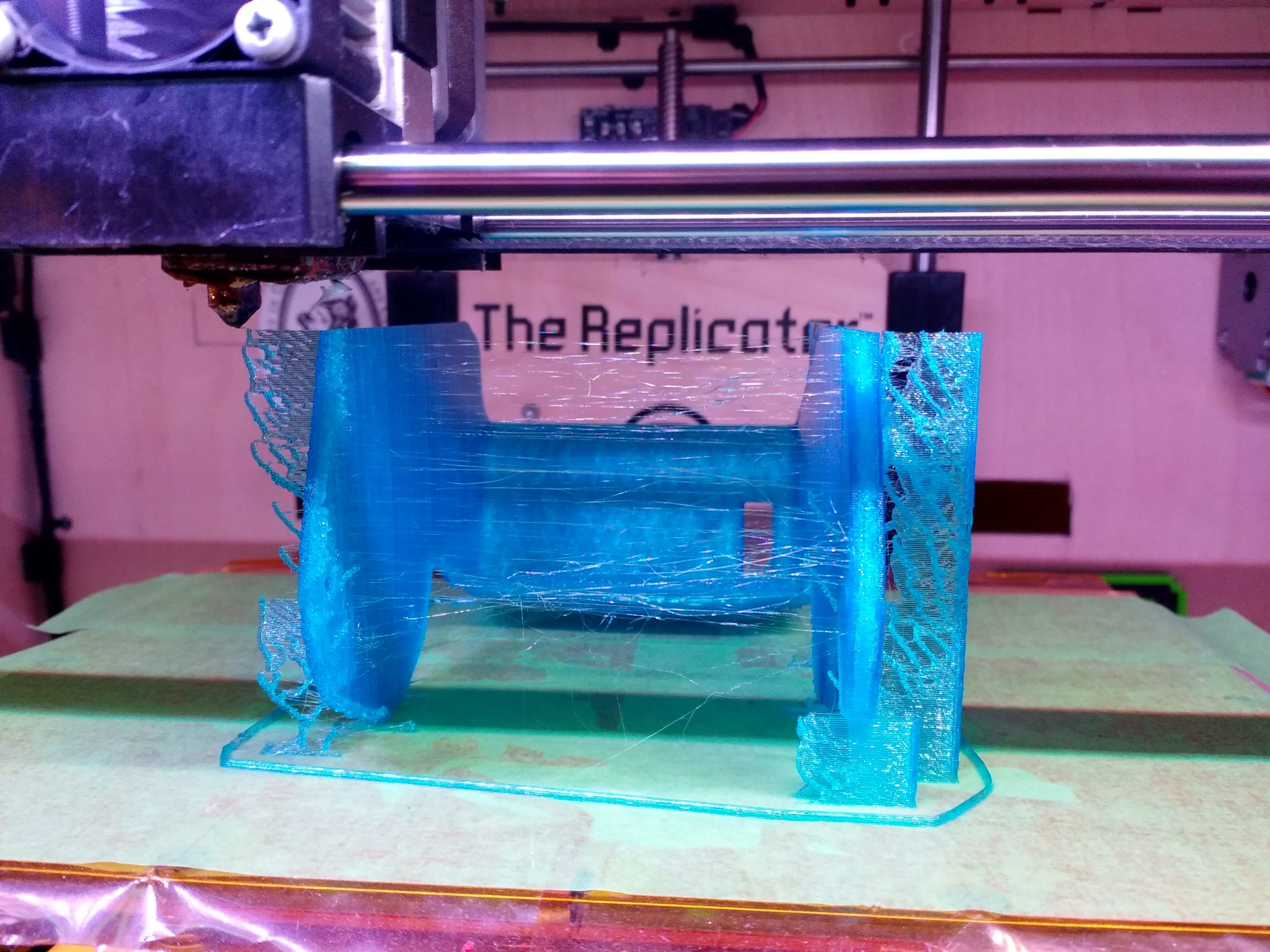
New pieces printed
Print error
Used glue stick, print is working better
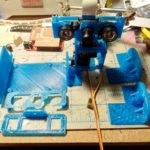
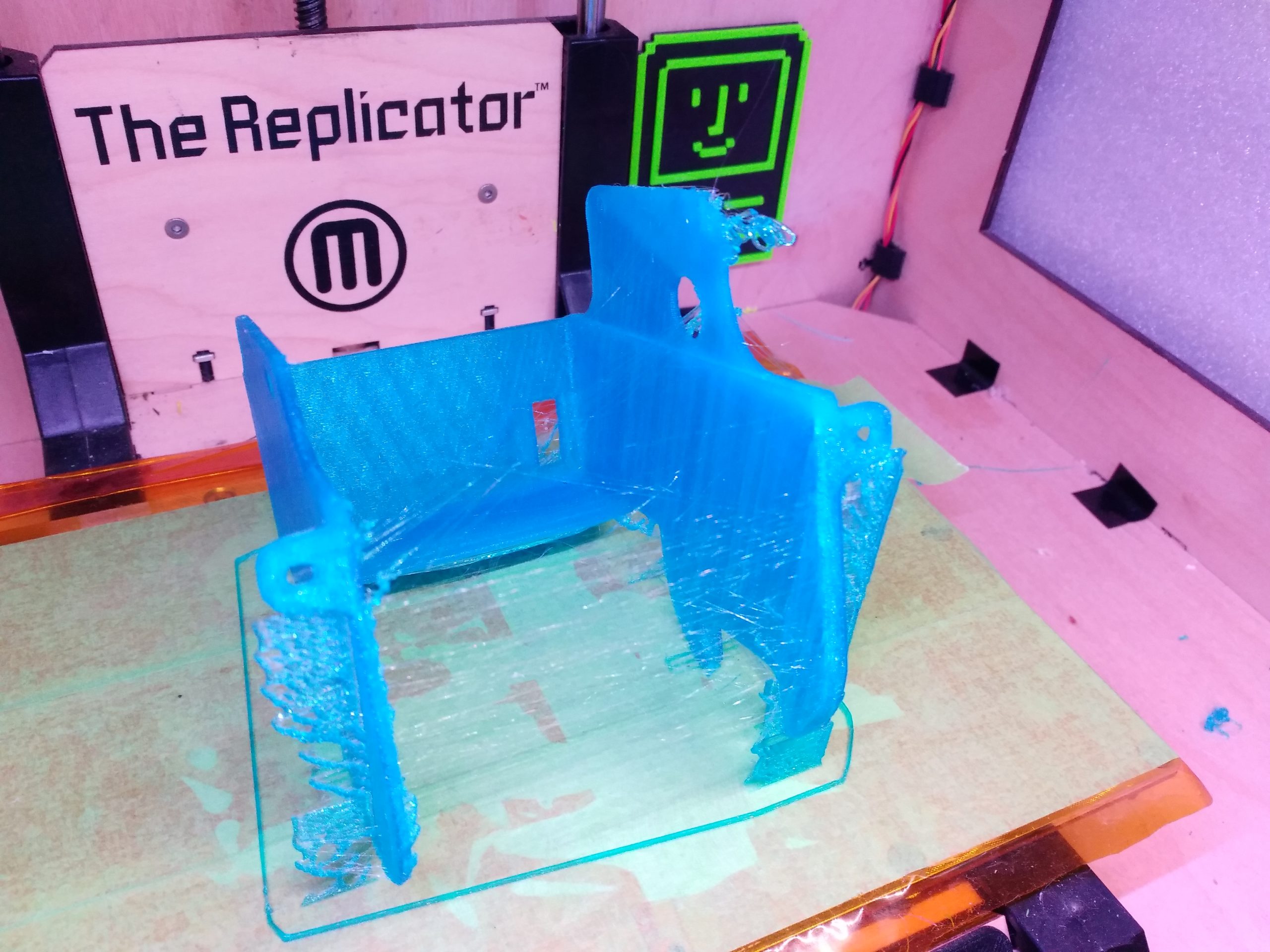
Print of Pi shell complete!
Next update will show the complete assembly of this, stay tuned! And good luck to the uOttawa team this week with their presentation!
We met with some of the uOttawa group and discussed the CAD model and the object detection training model. It was interesting, for the object detection model, there are some out there, like this one on kaggle for garbage detection. If we can build on this, it will help get ahead faster.
The Garbage Classification Dataset contains 6 classifications: cardboard (393), glass (491), metal (400), paper(584), plastic (472) and trash(127).
The CAD model is ready to be printed! We have a printer here, and this seems quite like teleportation. We will begin printing it asap (waiting on some PTFE oil before starting a long print).
Beck is still working on the drive system instructions, but no progress was made since last update.
The uOttawa team has their presentation coming up soon! Thank you to their effort this semester!
Our first virtual meeting! This week we went over button parsing for the Operator Interface, and discussed about the RPi mount for the pan-tilt and IR camera. We had a few people from the uOttawa group connect, it was good to test out the technology. We used Jitsi Meet for the video call, it is open source!
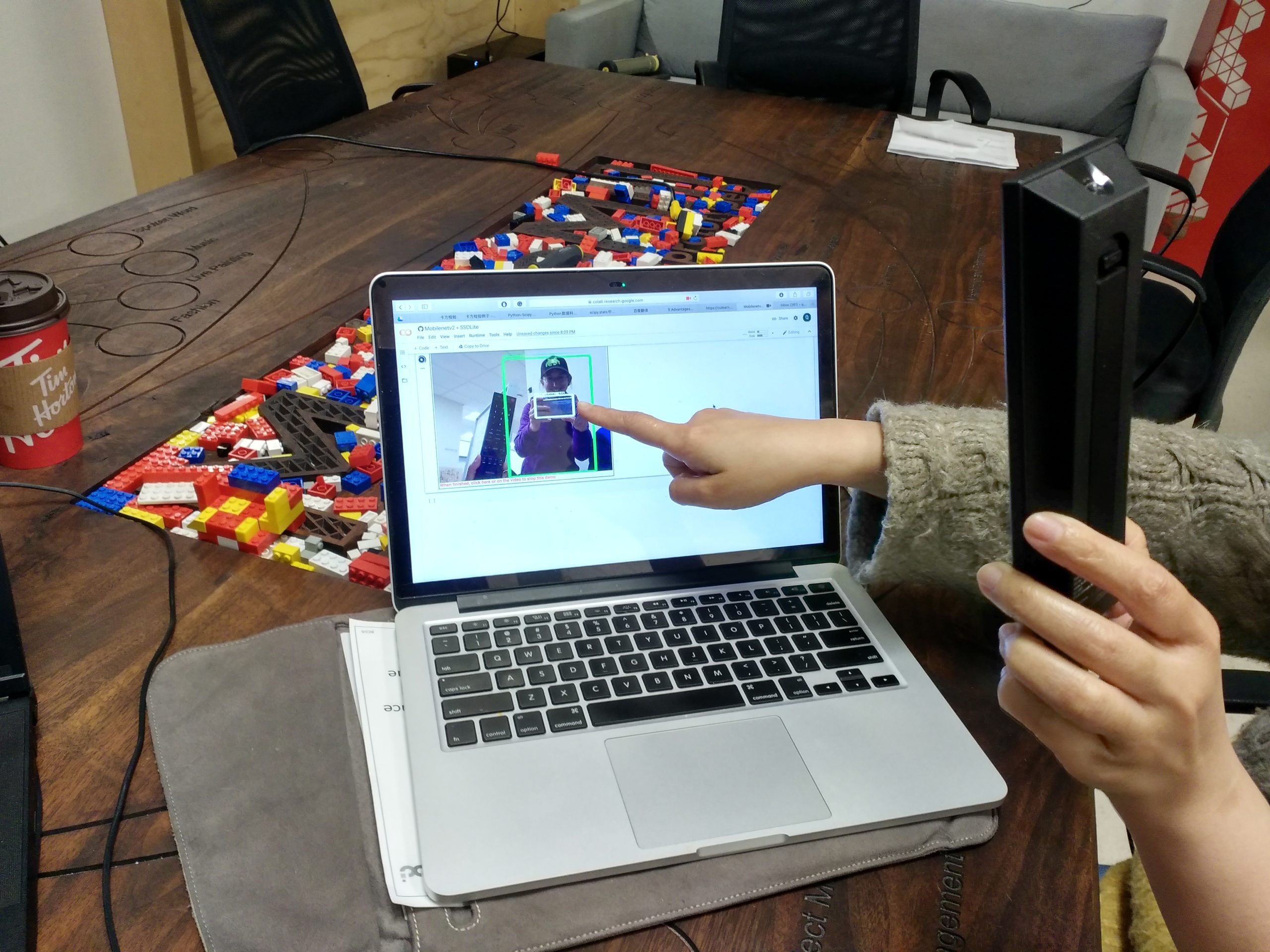
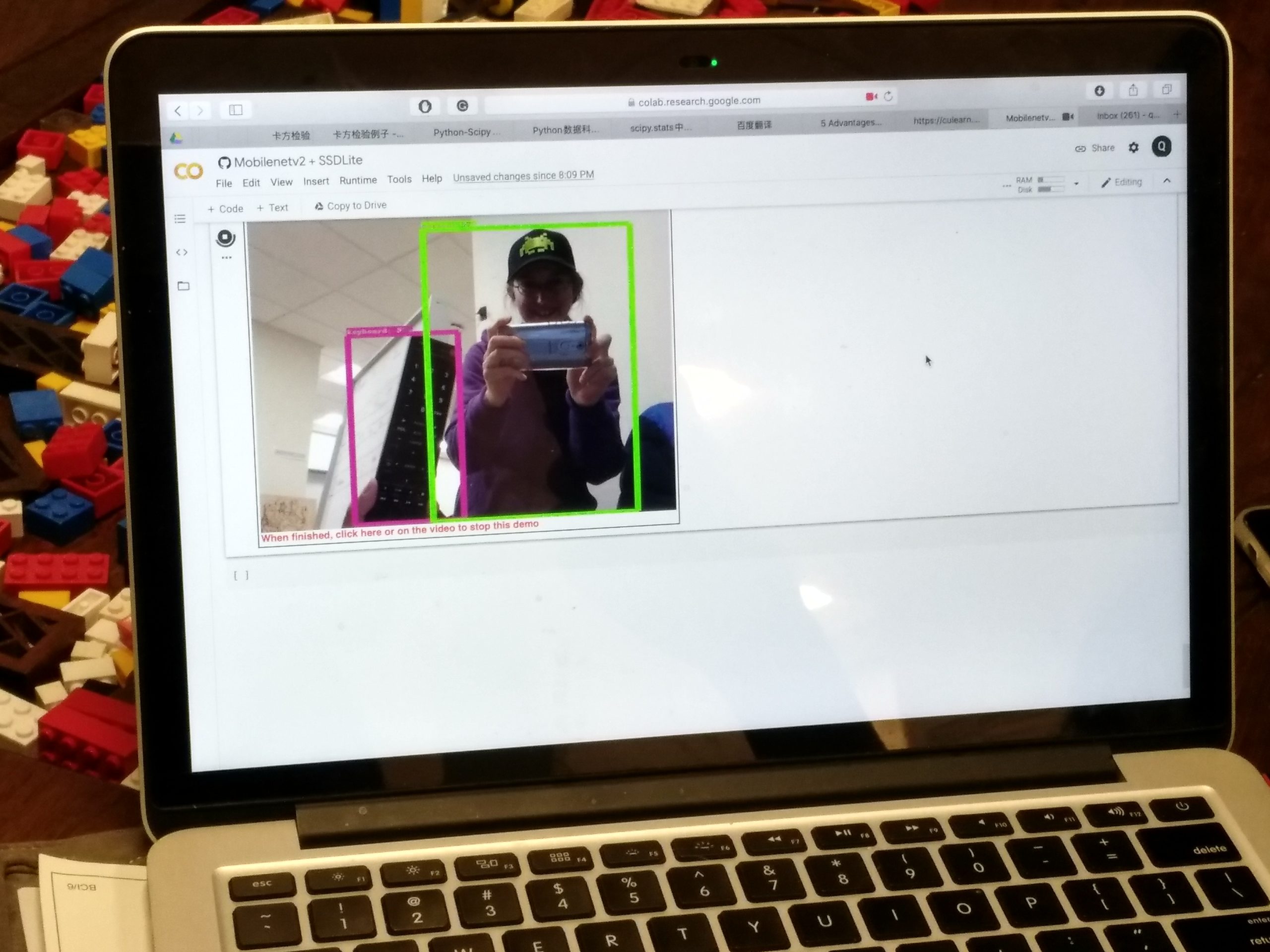
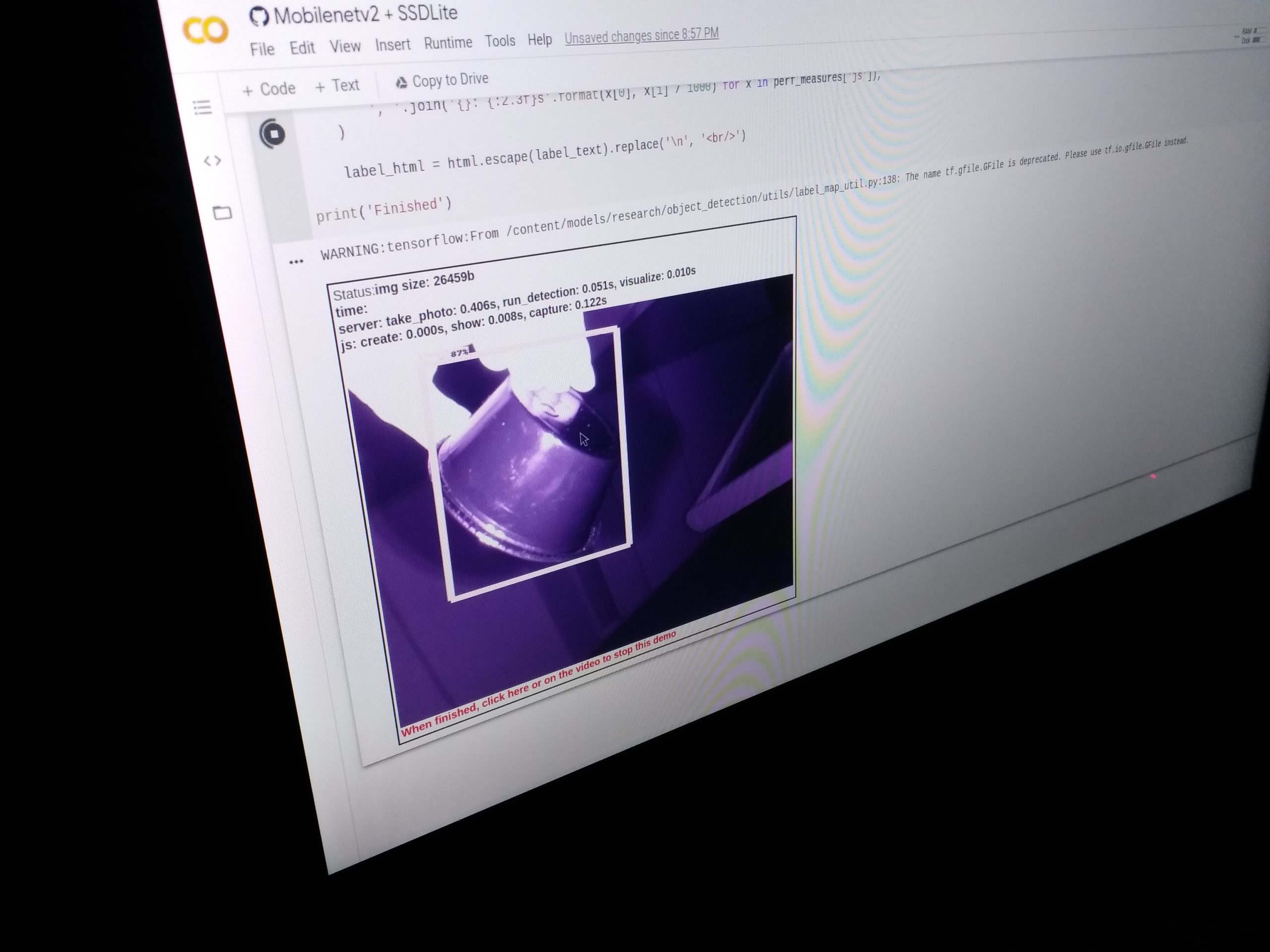
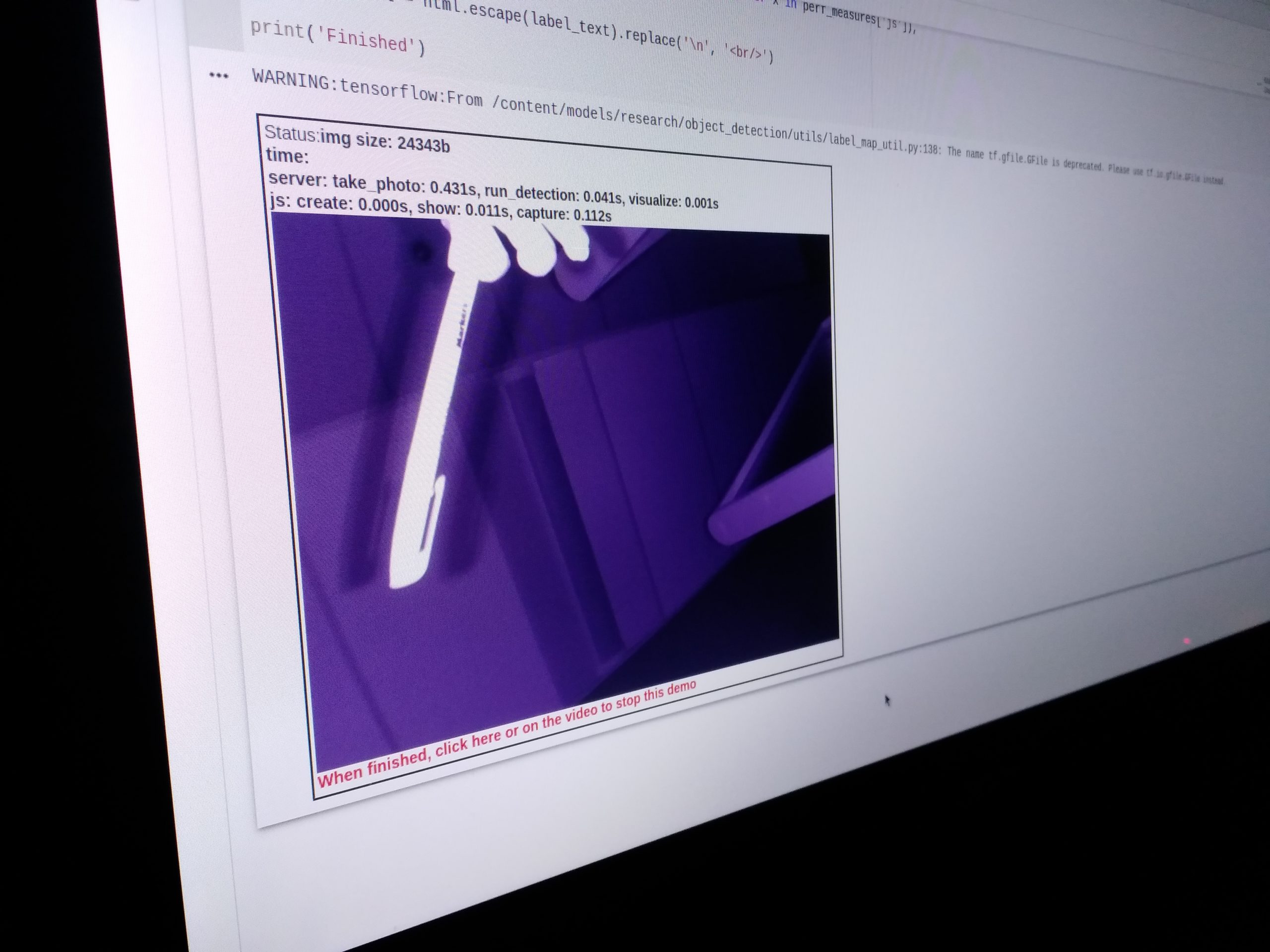
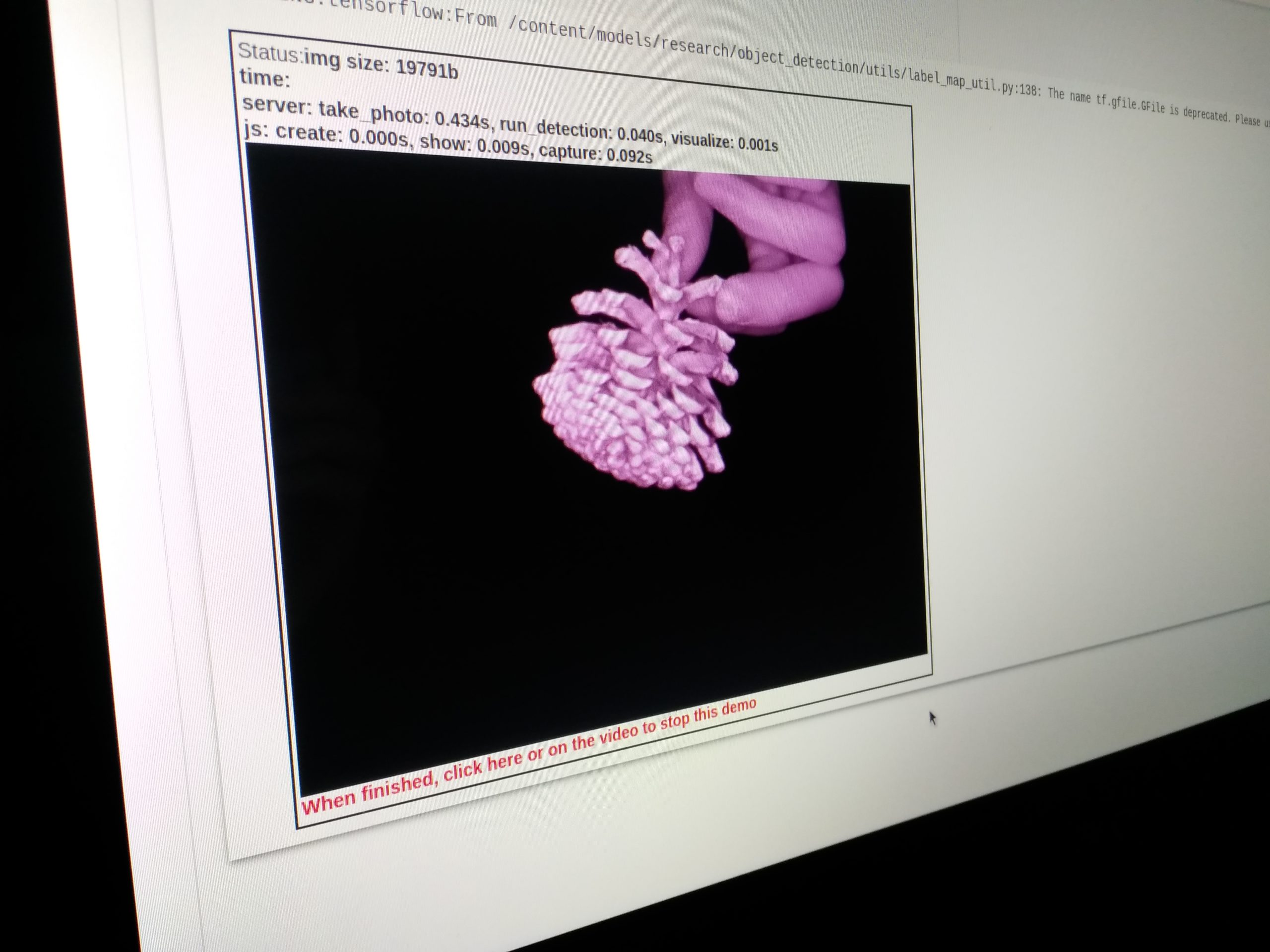
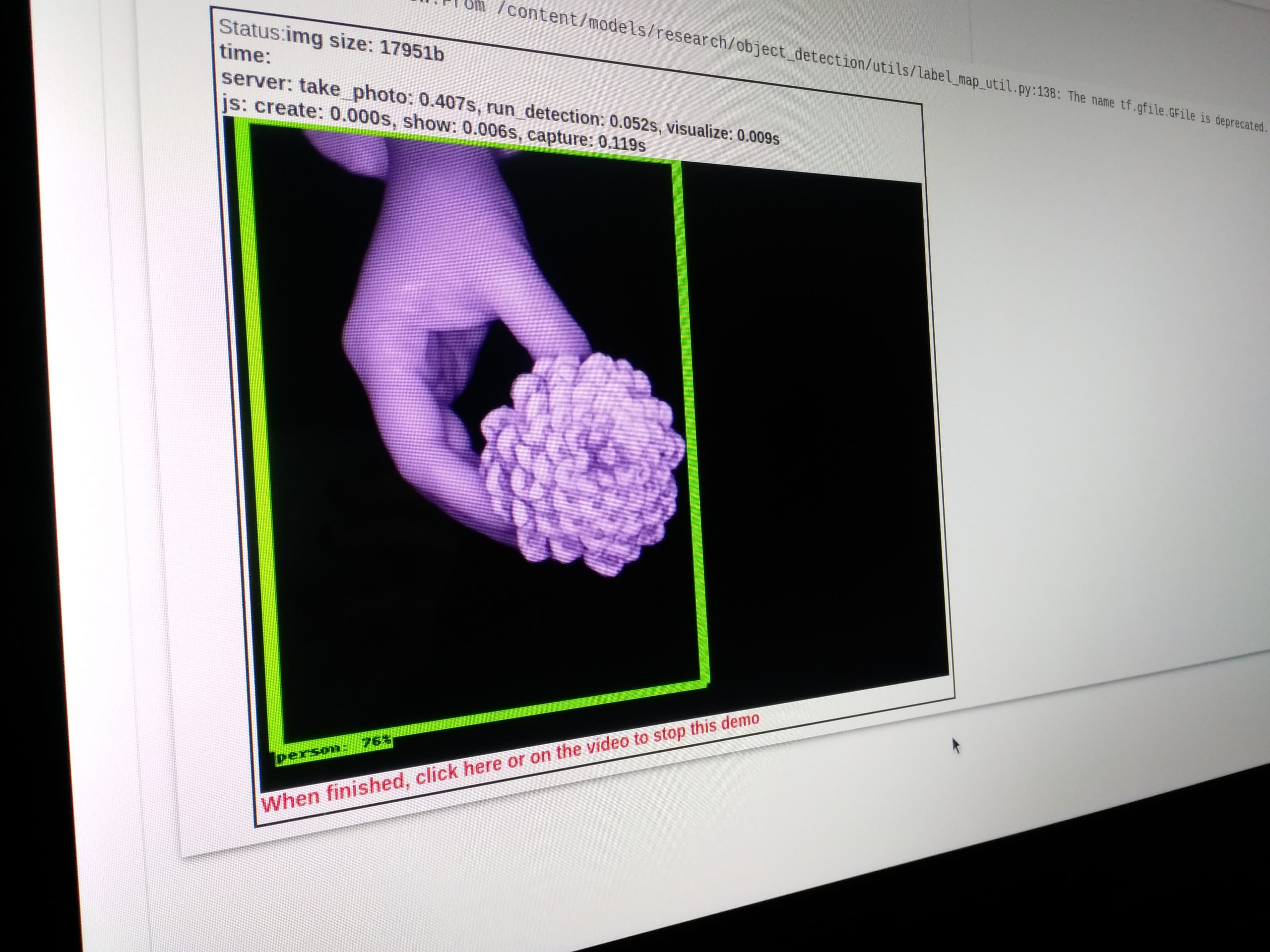
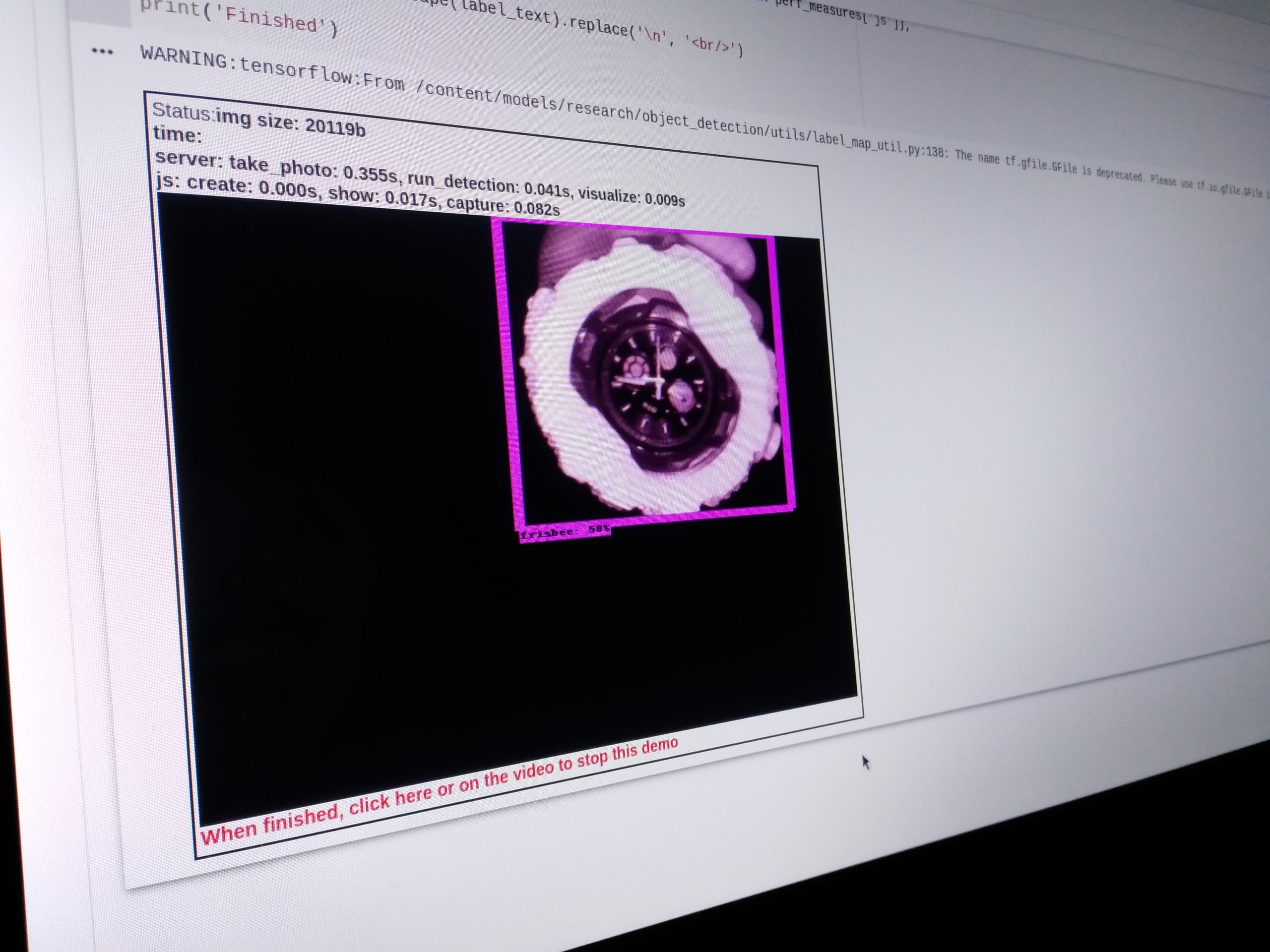
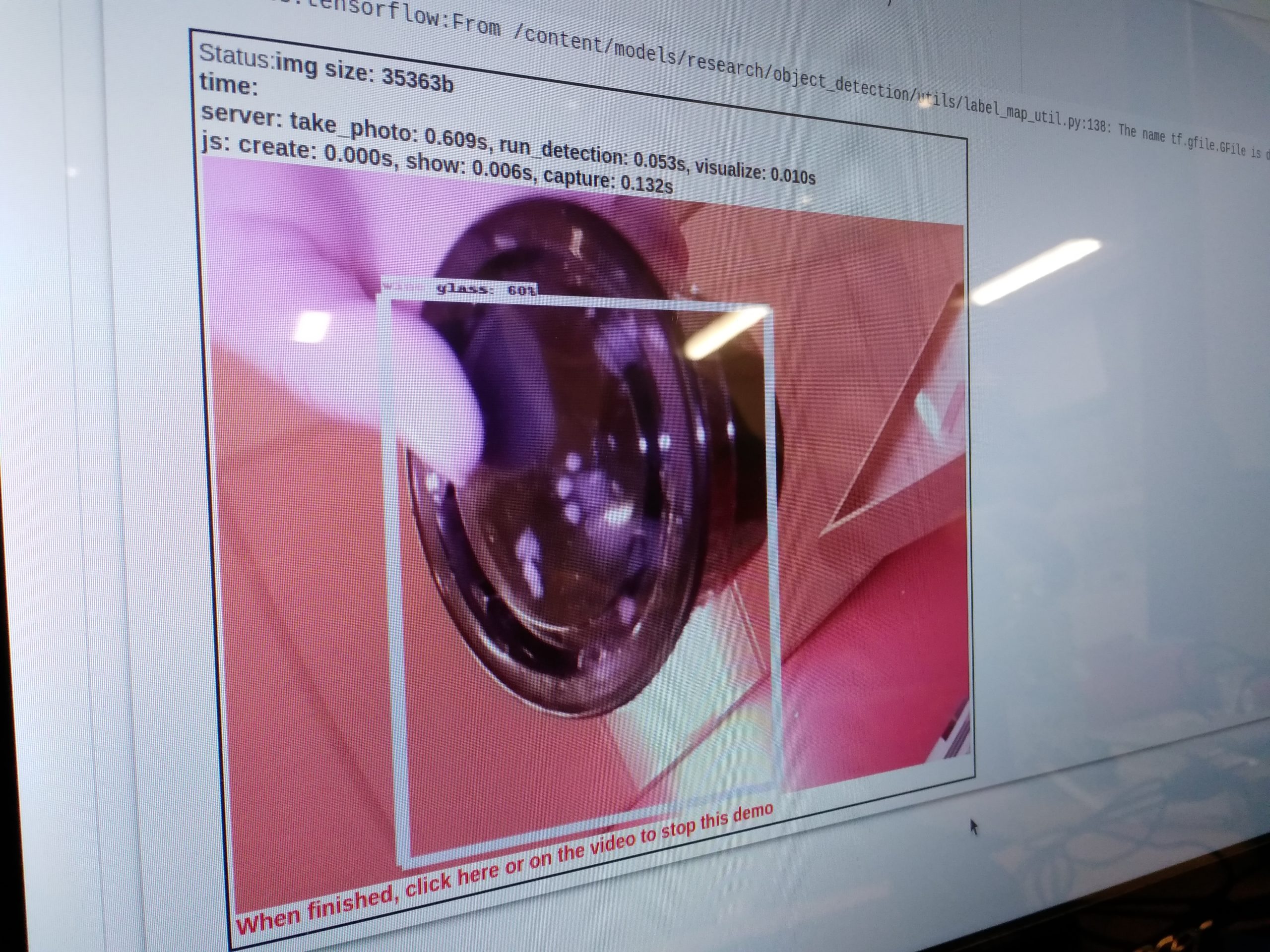
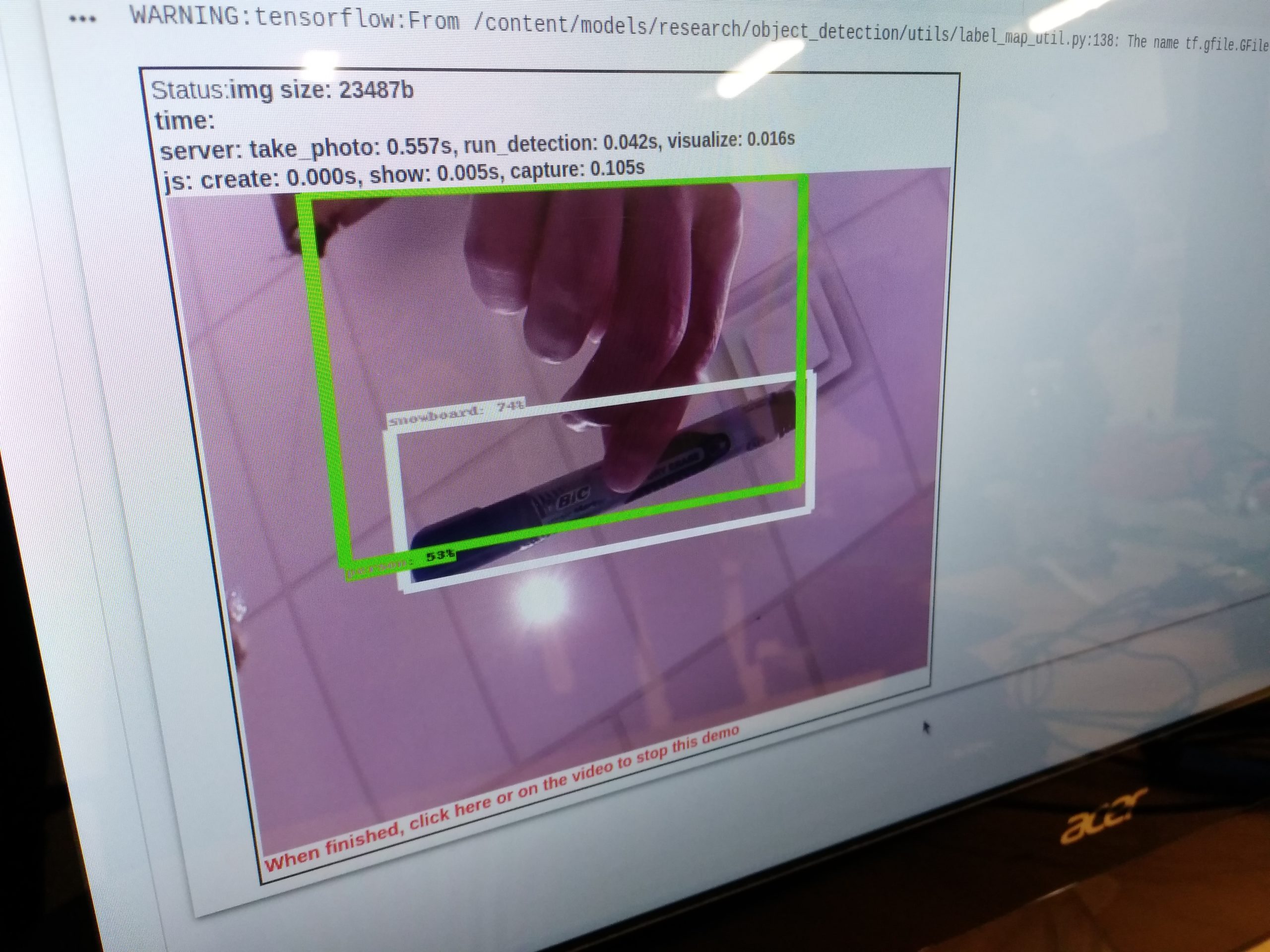
There was a good amount of progress that culminated this week!The uOttawa group got Tensorflow object detection working with the IR camera attached to the RPi! We were able to see what the objects were being detected as. This was just using the standard MobileNet model, and there were results such as surfboard in there too.
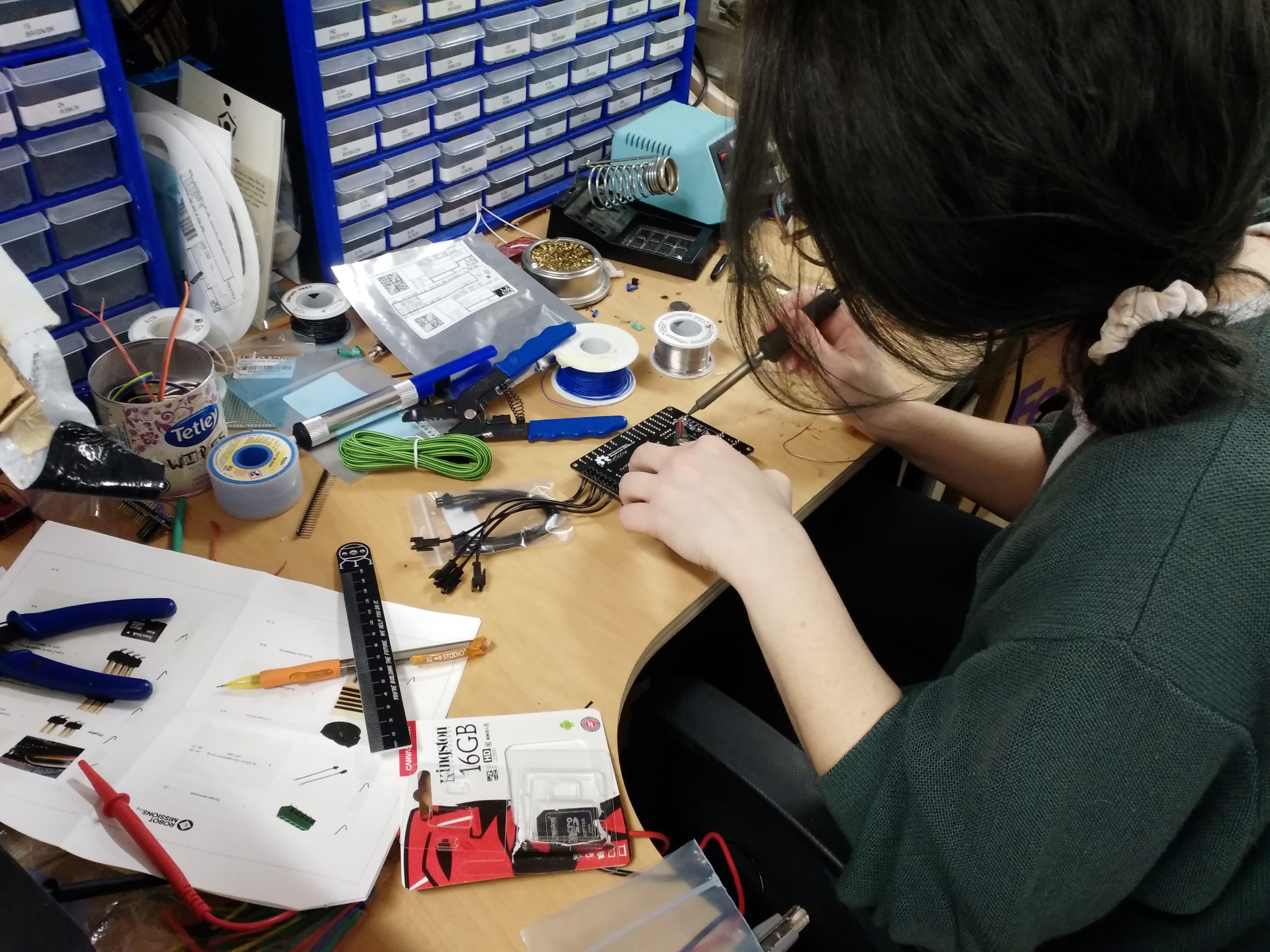
Beck completed the Bowie Brain Kit! It is now completely soldered. Next step is programming the first blink! As well, we had the chance to meet someone new, Queenie, who was interested in learning more about Robot Missions.
Hooray! It’s great to see it when progress meets a milestone. Congrats to the uOttawa team!
Meeting Queenie, who’s also interested in environmental robotics
Tensorflow is running!
Hello! Tensorflow!
Now setting up the RPi
We ran into an issue with this wifi, but switched to another and it worked
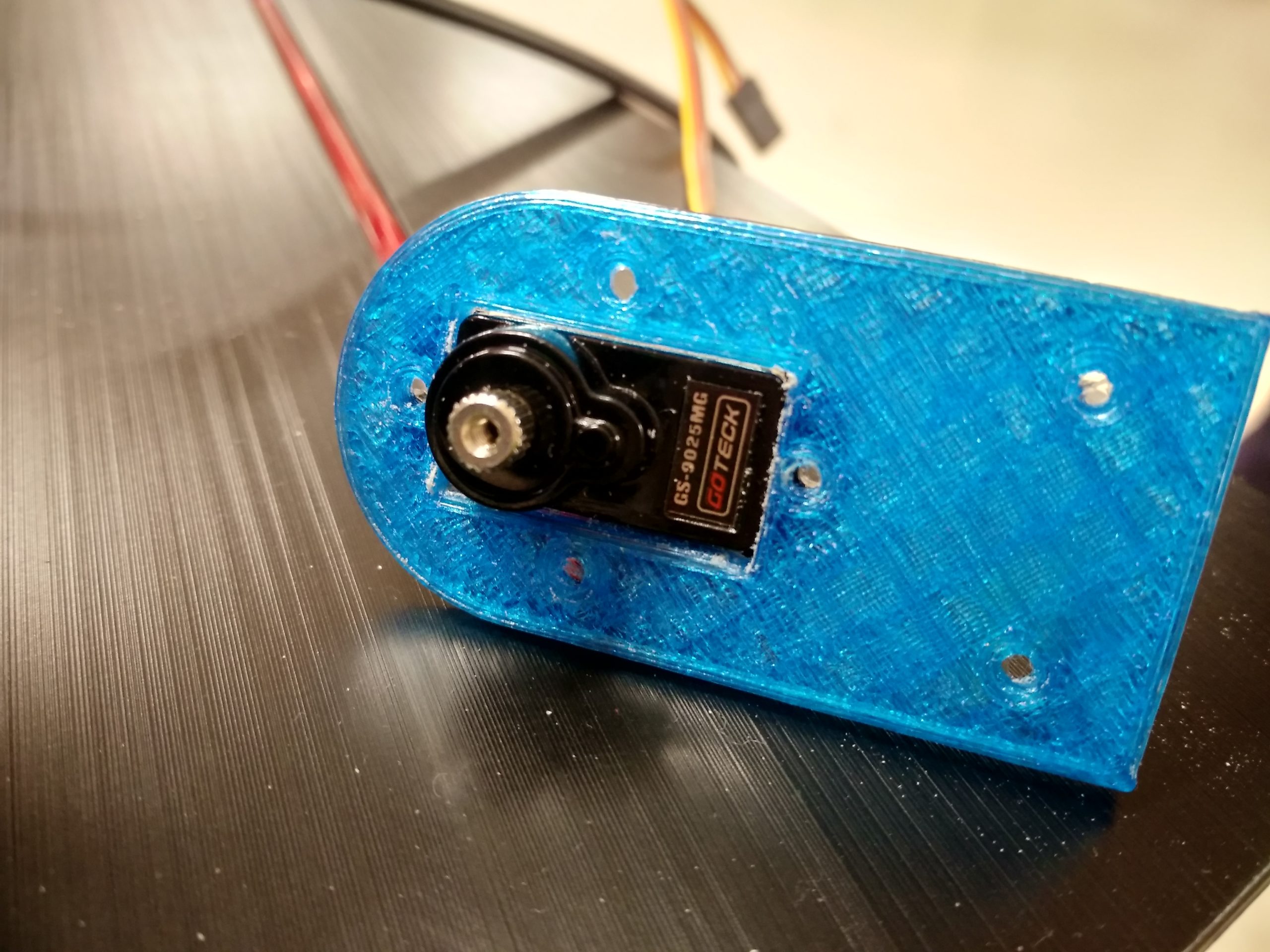
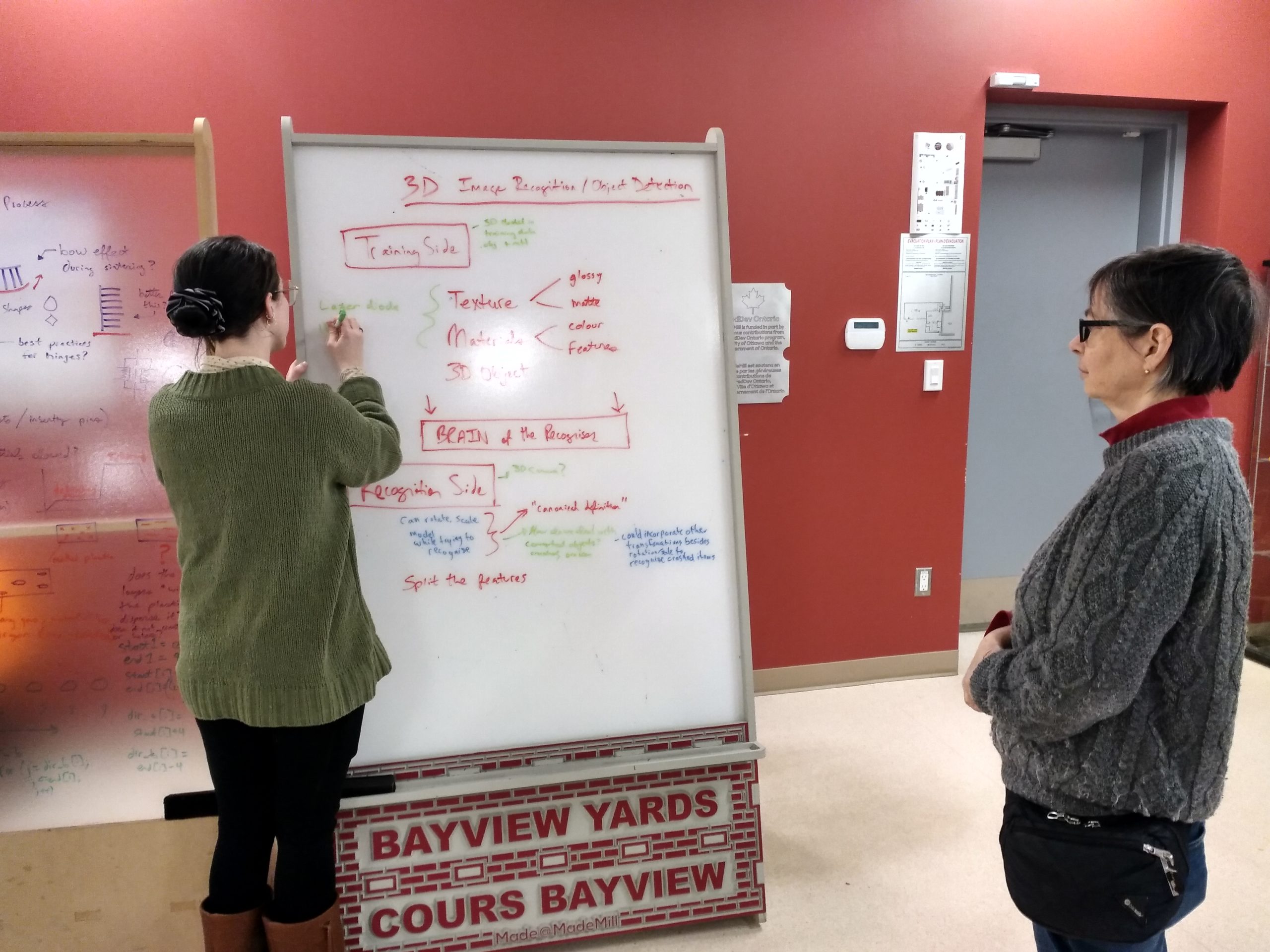
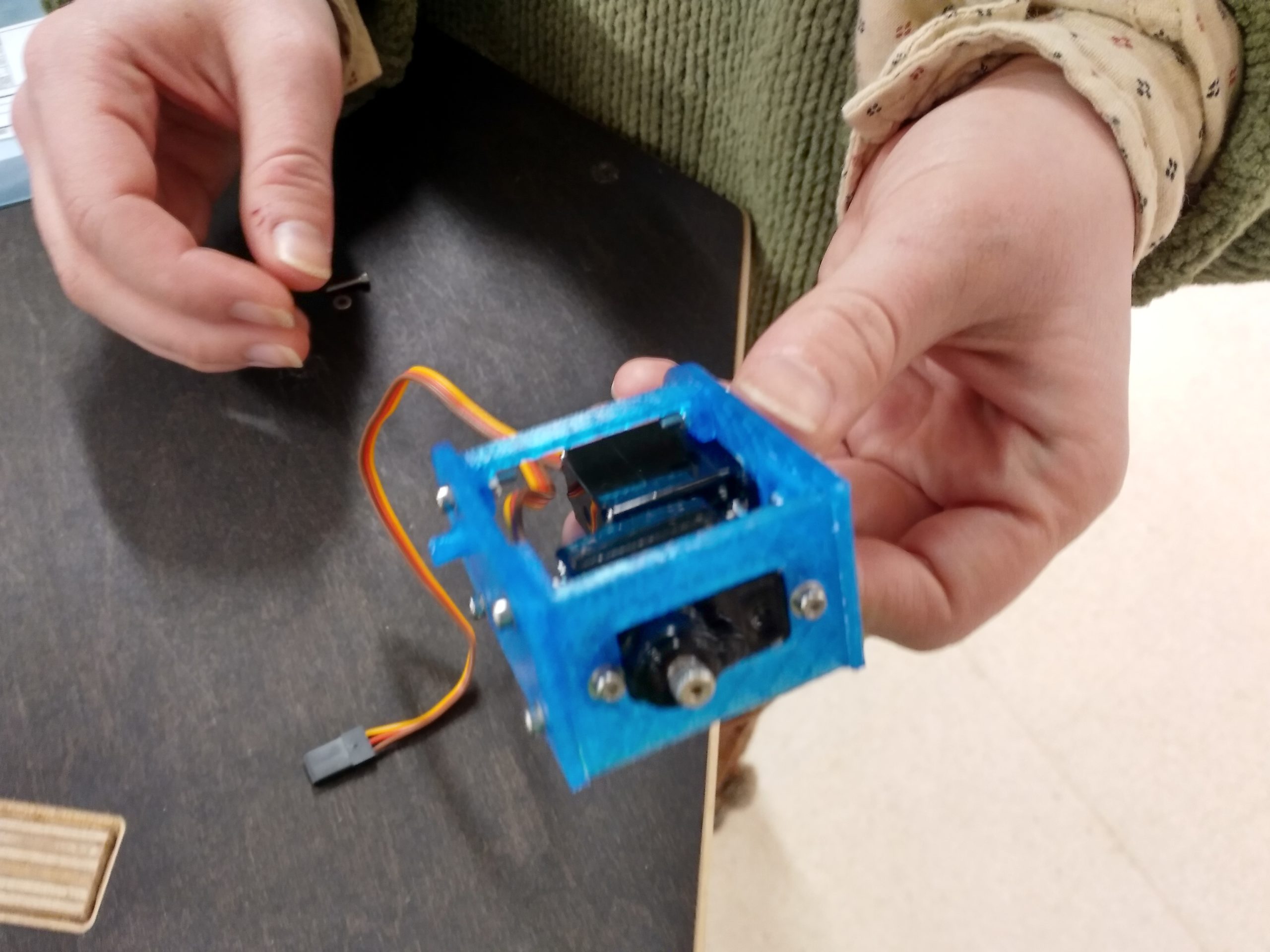
The uOttawa Masters Engineering group made progress on 3D printing the pan-tilt mechanism for the IR camera. Beck gave a tutorial to the group on how to 3D print with the Tinkerines and how to slice the models. Meanwhile, another member of their group worked on installing Tensorflow on the Raspberry Pi. The servos fit perfectly into the mount, and it gets assembled with M2 screws. Beck and Brenda made progress on their Bowie Brain Kits as well. Brenda had a thought about a 3D object detection method, so we brainstormed a bit about that on the whiteboard. Next steps is to continue the work.
Beck and some of the uOttawa team
Jessica from uOttawa working on installing Tensorflow
Servos fit in 3D print!
Brenda equipped and ready to solder
Brainstorming how 3D object detection method could work





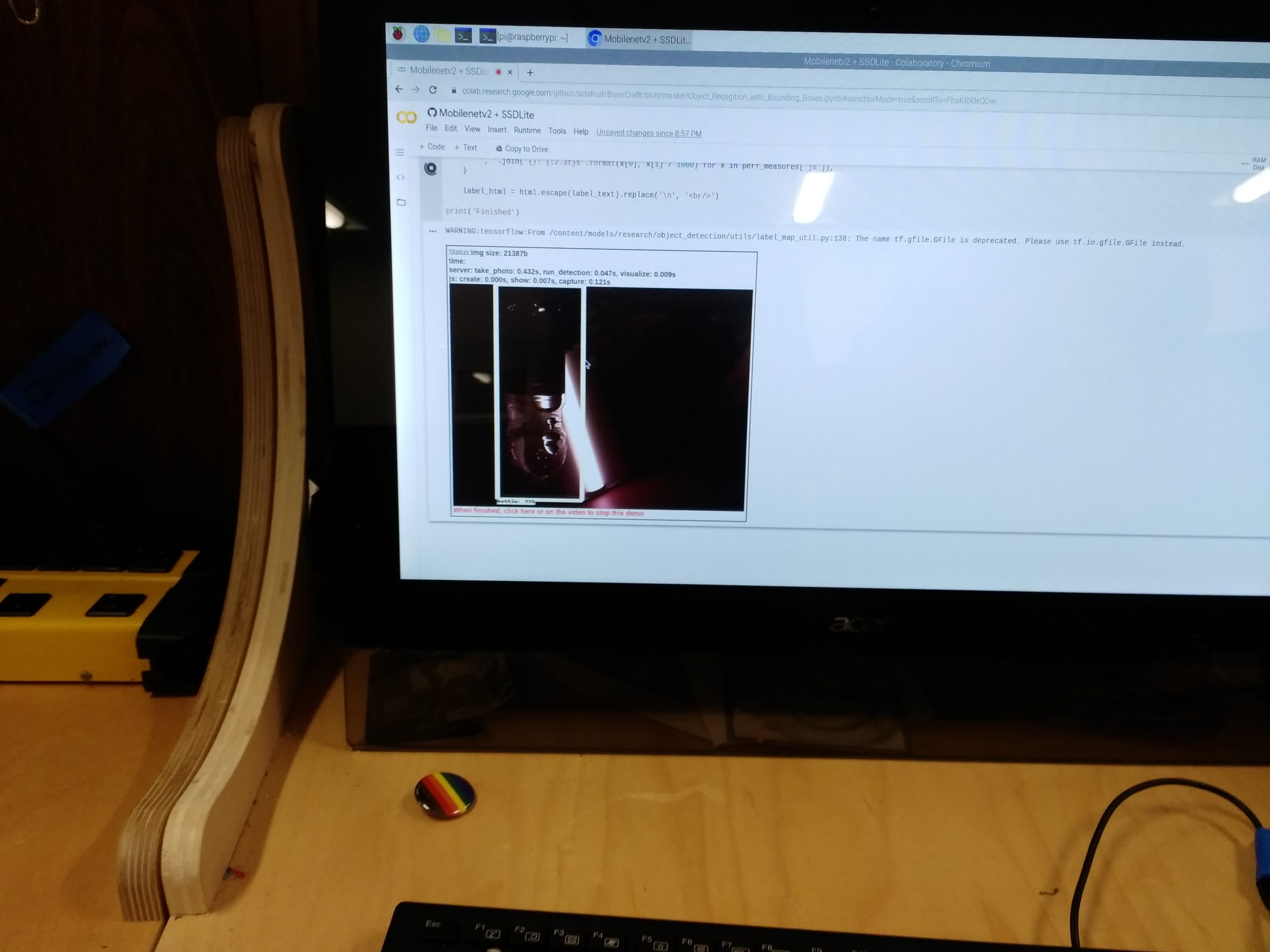
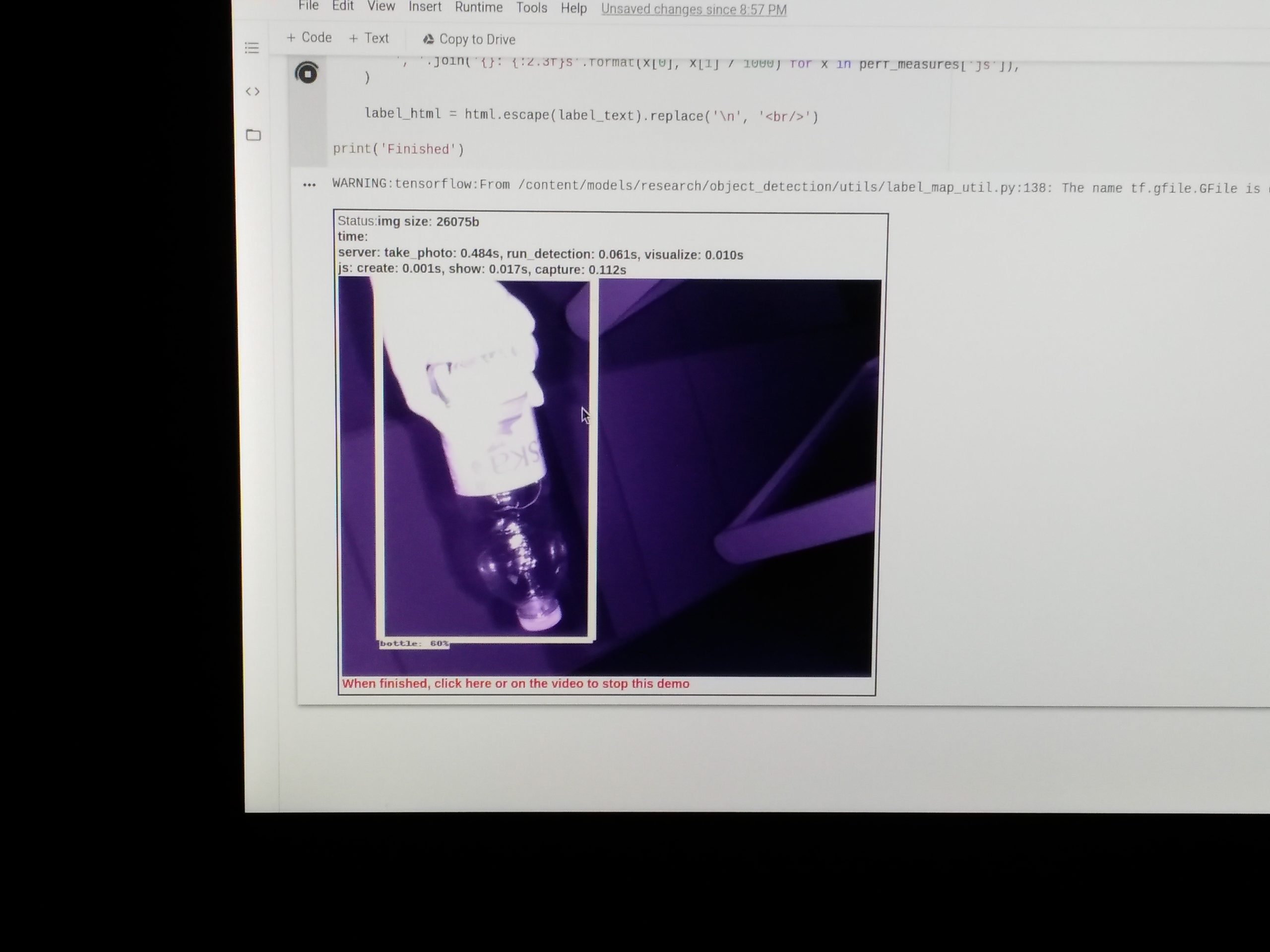
![Collab Log #010: [VIDEO] Water bottle detected! (in IR)](https://www.robotmissions.org/site/wp-content/uploads/2020/03/IMG_20200311_211935-1080x675.jpg)