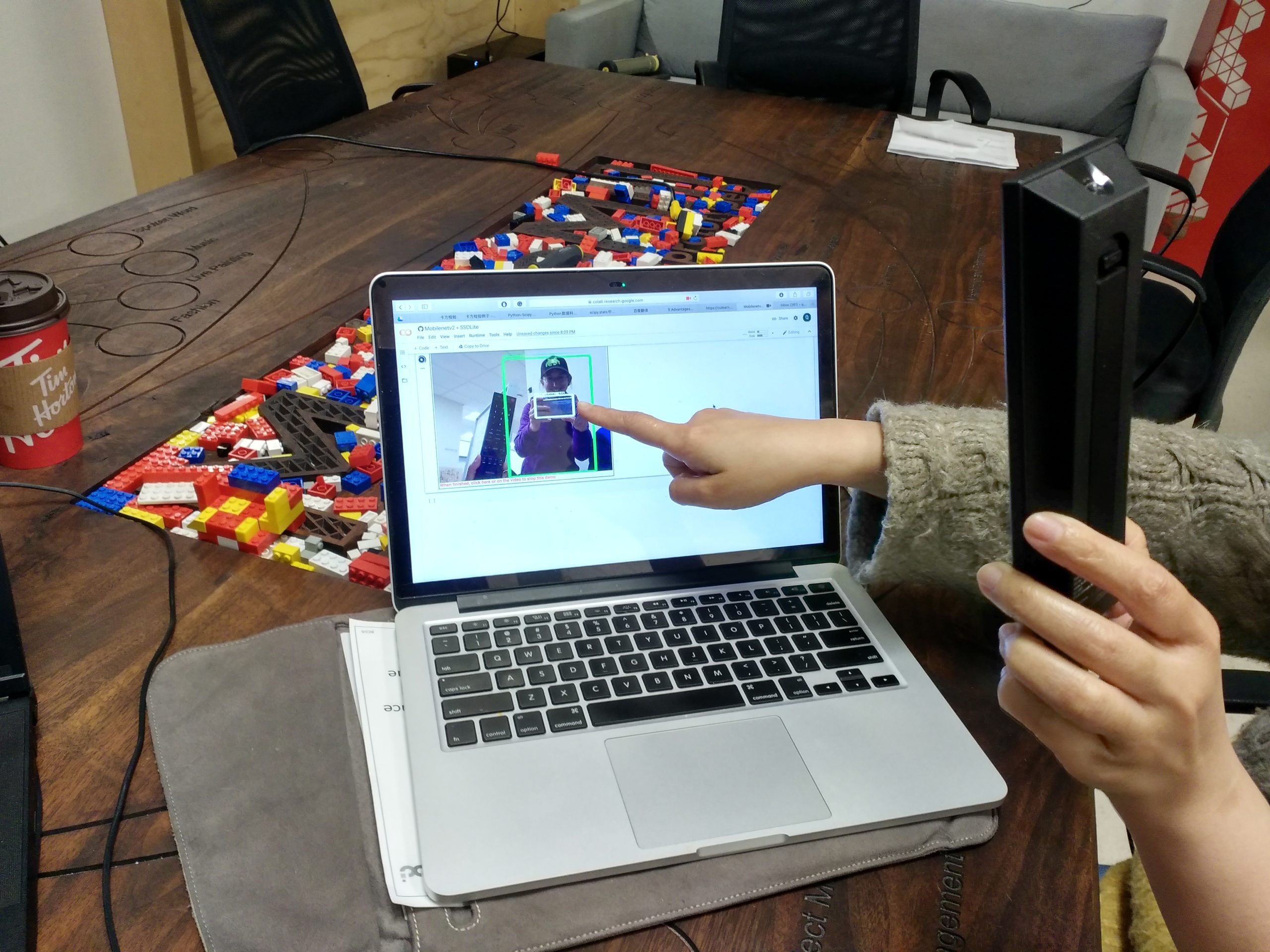
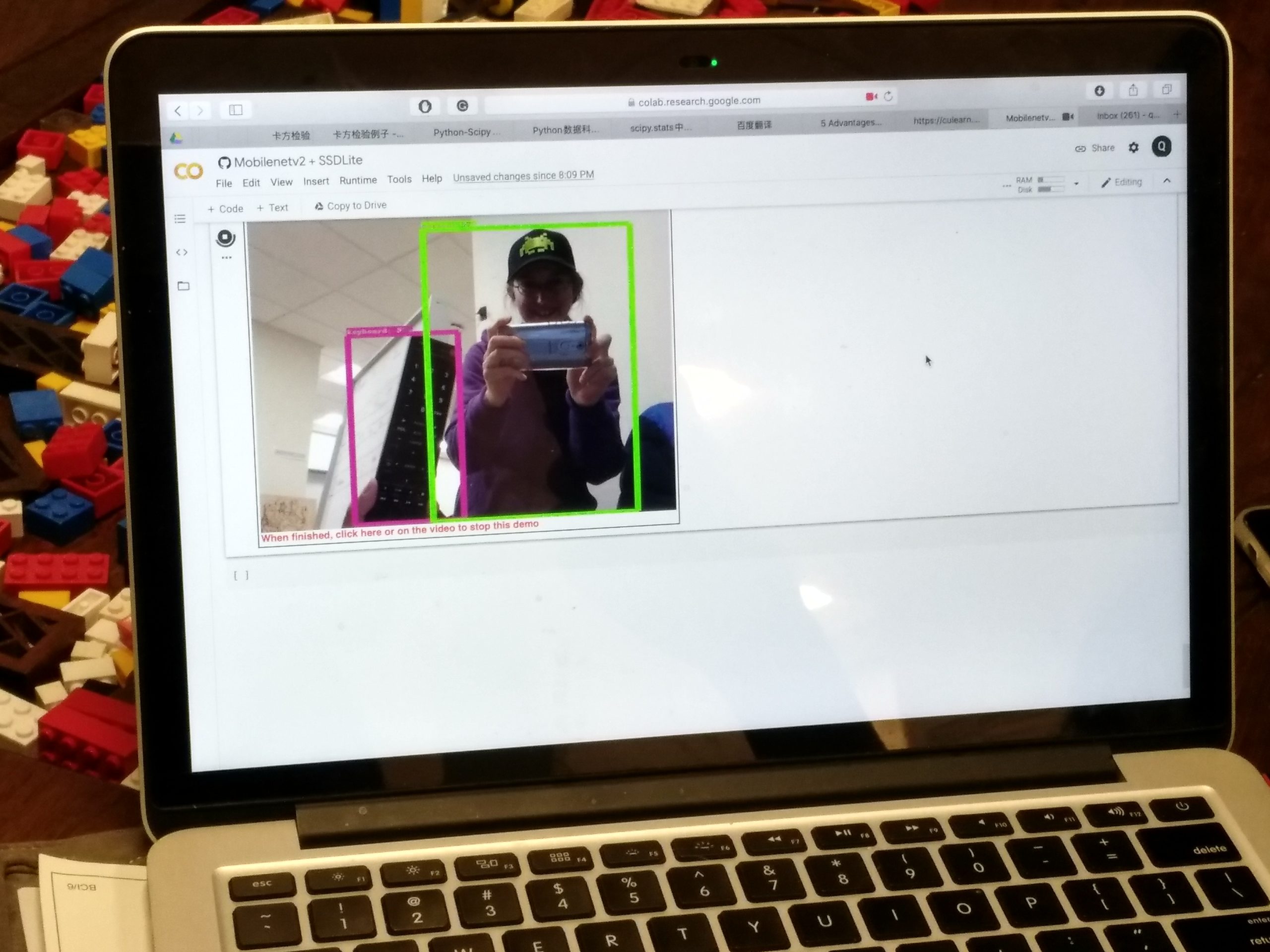
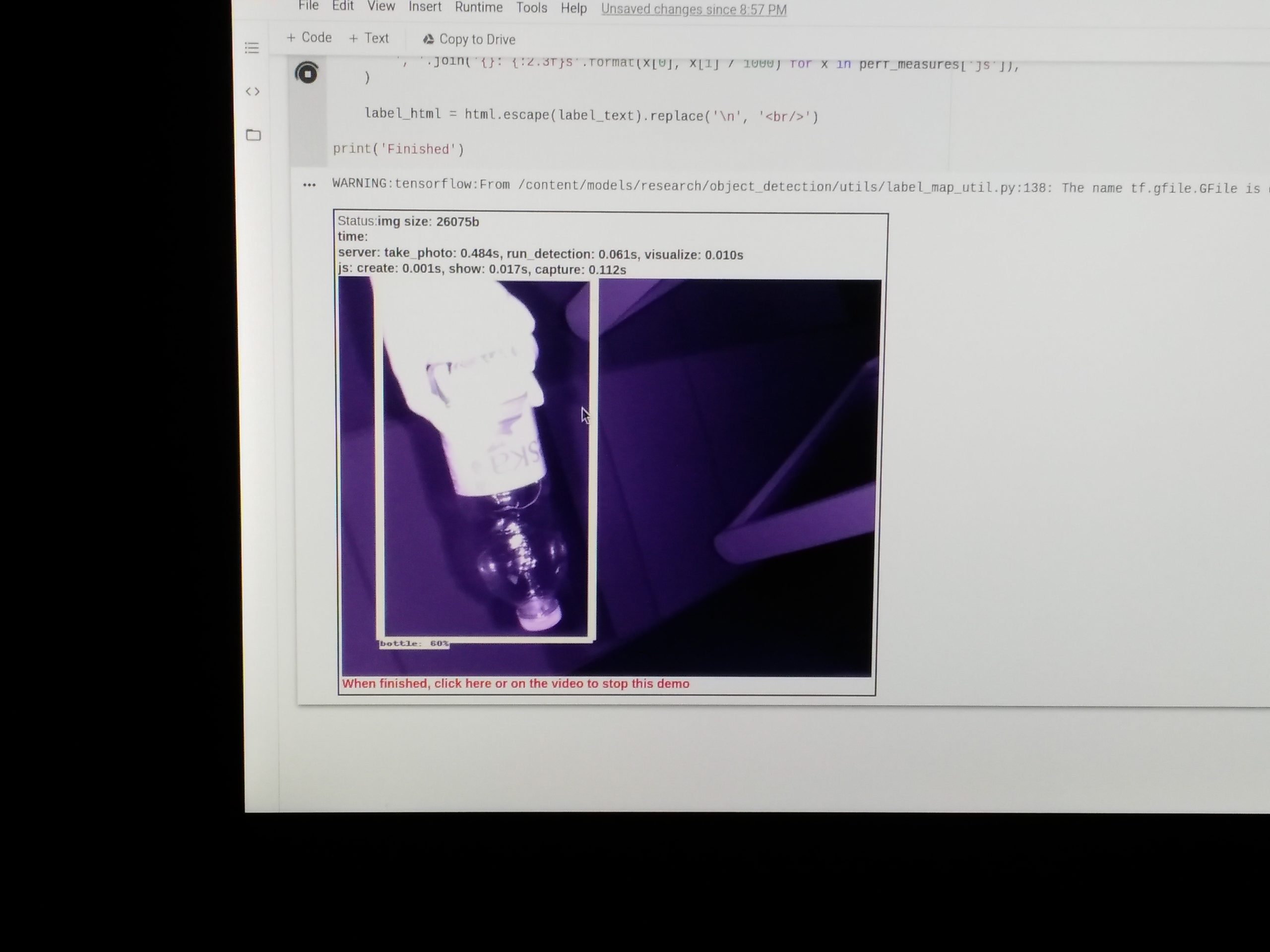
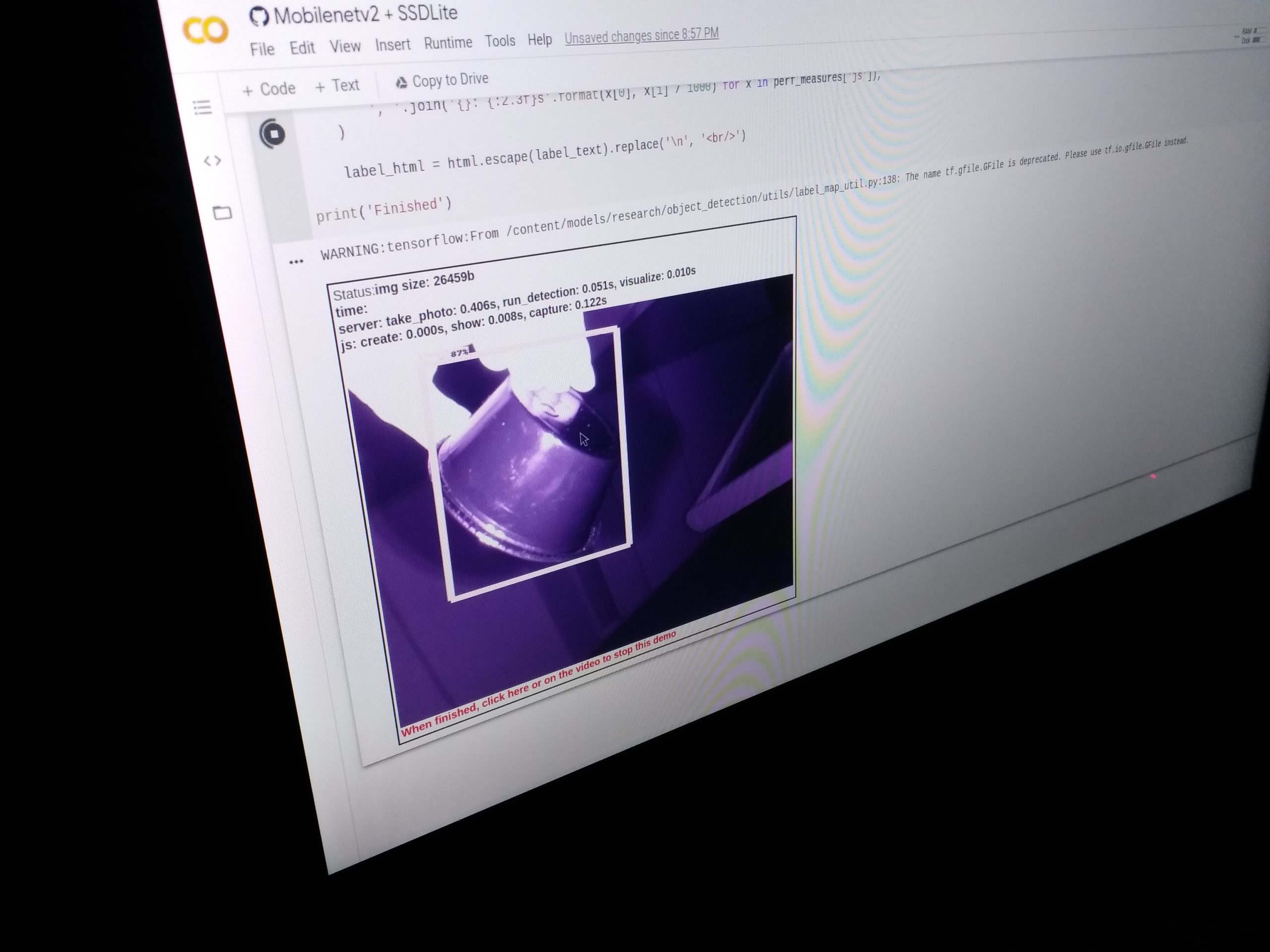
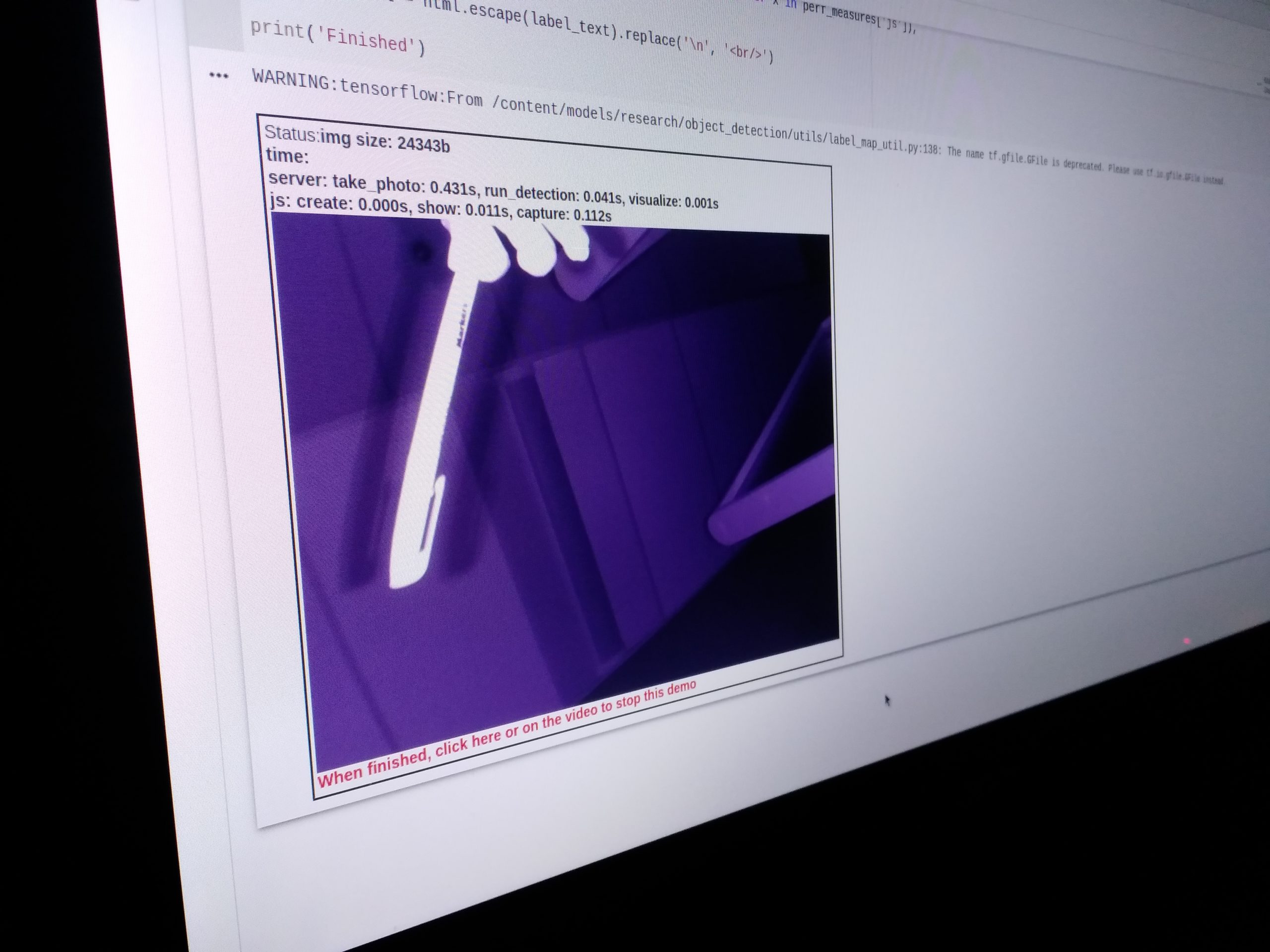
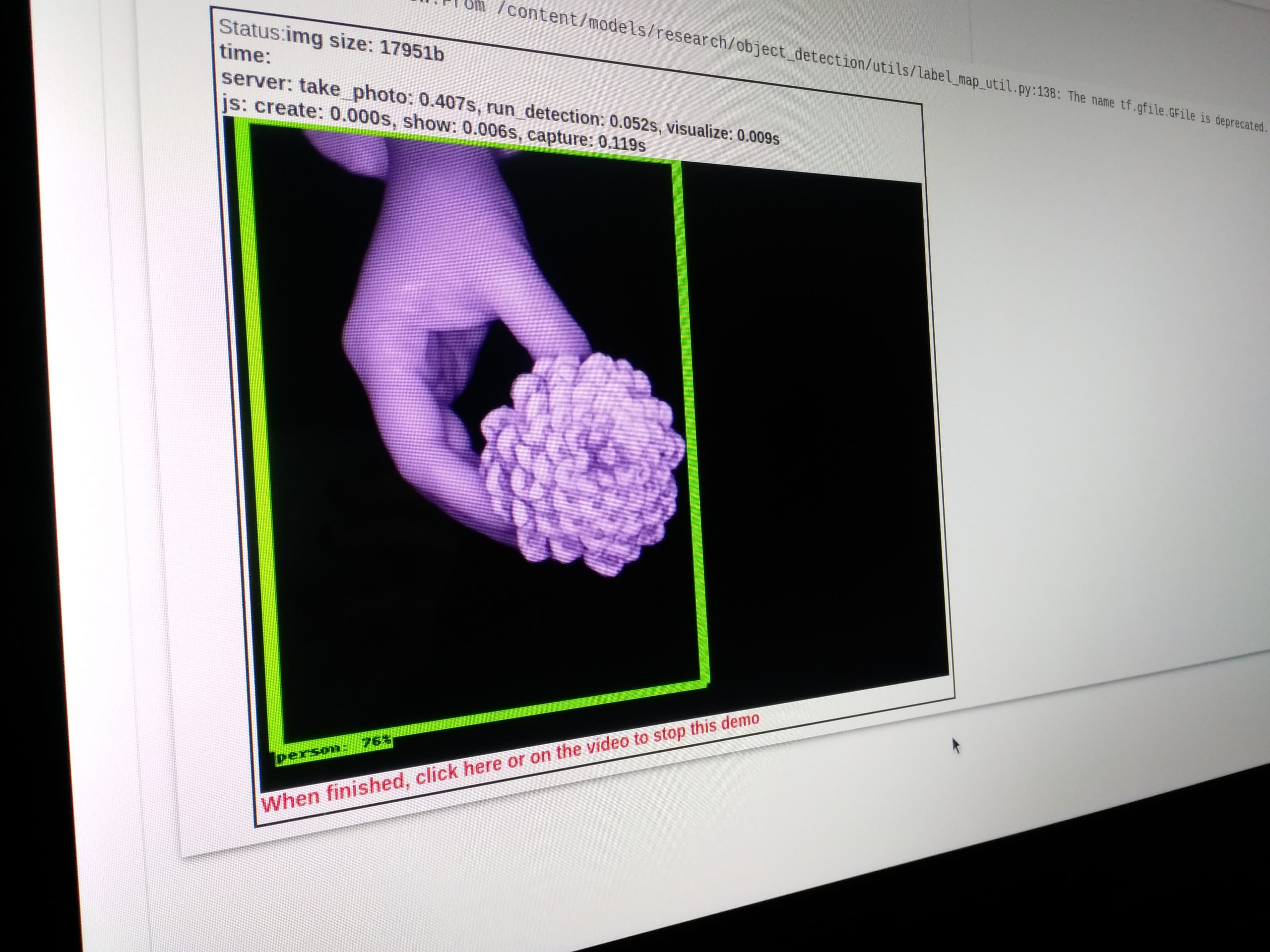
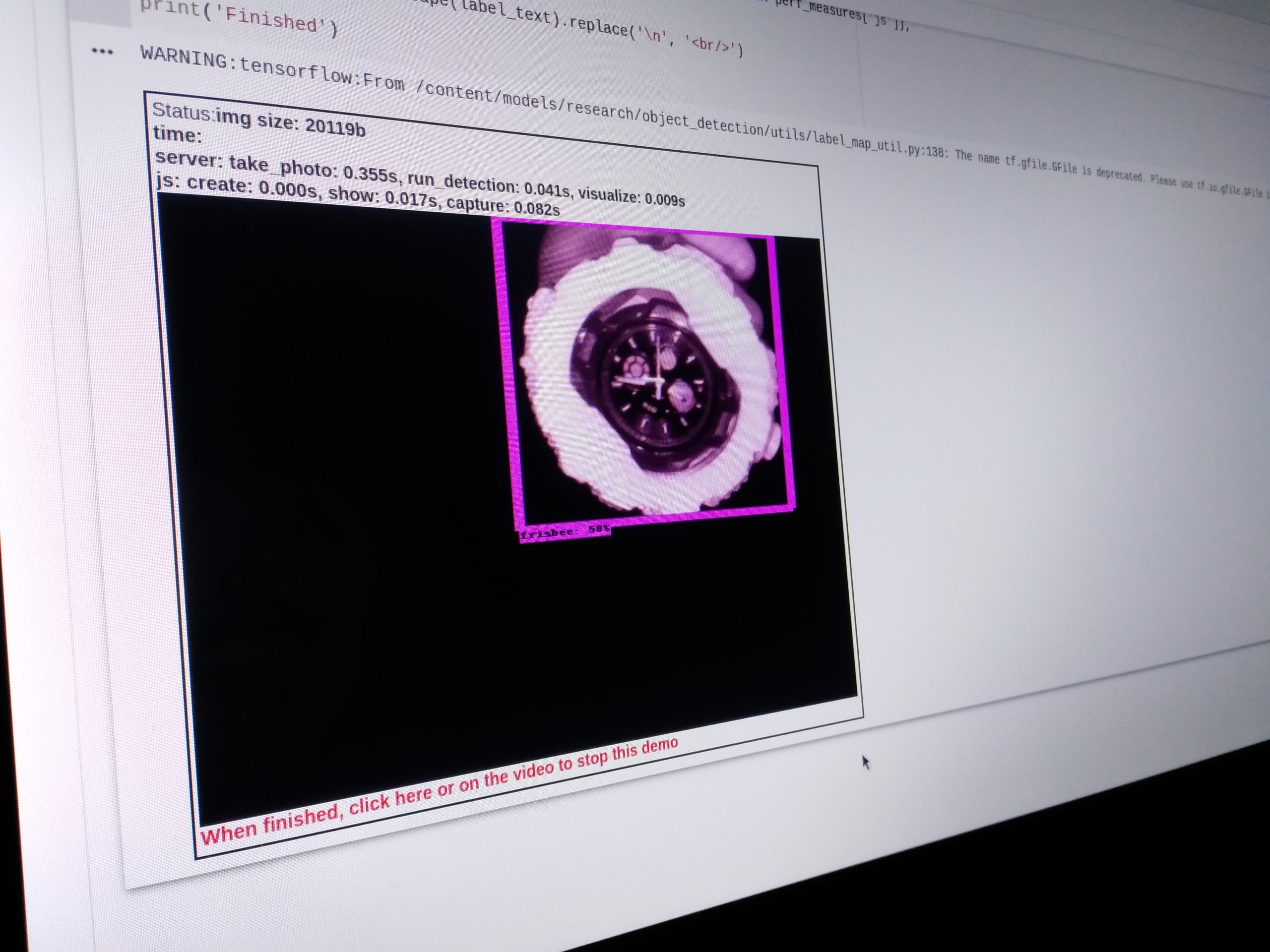
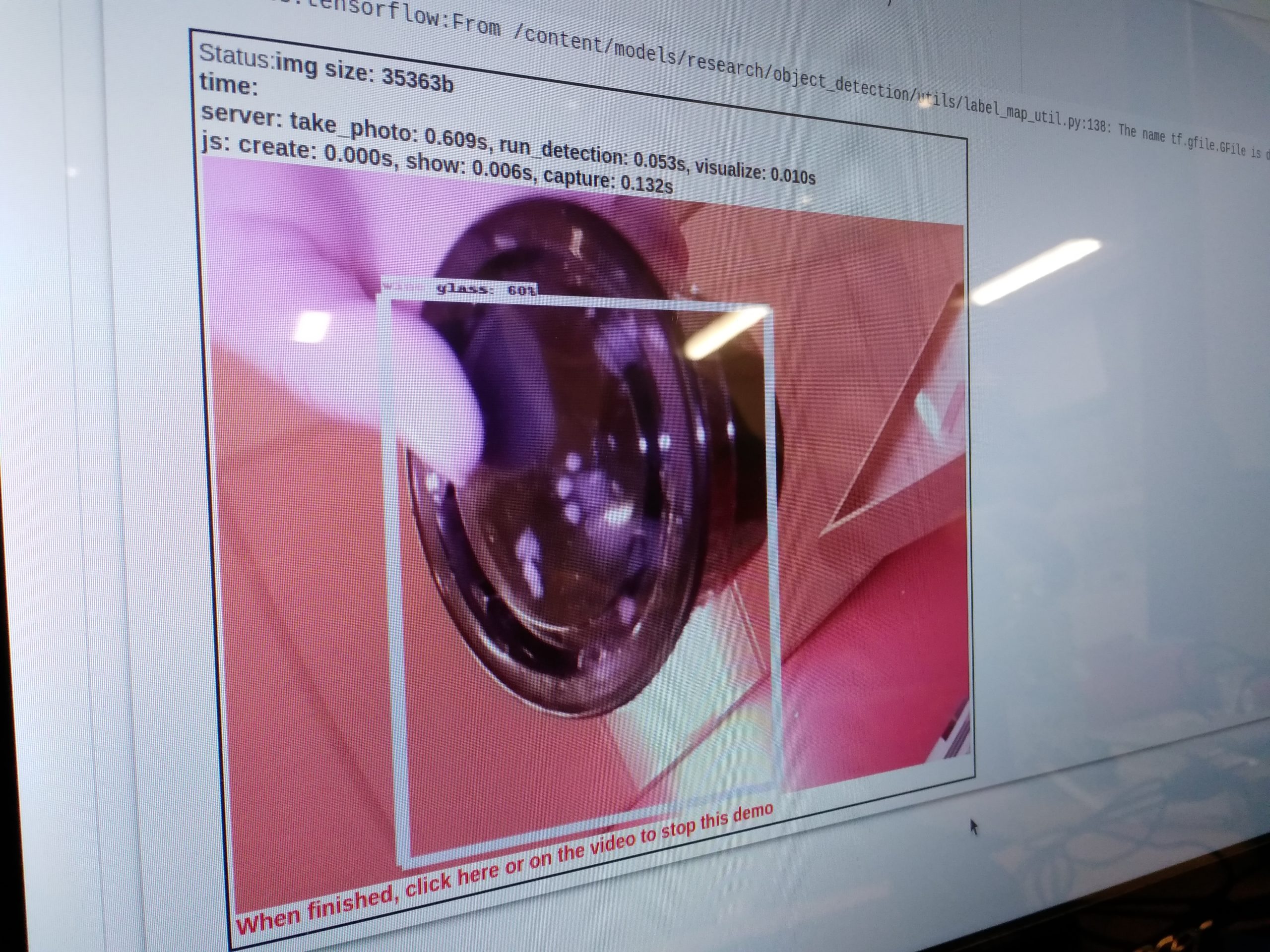
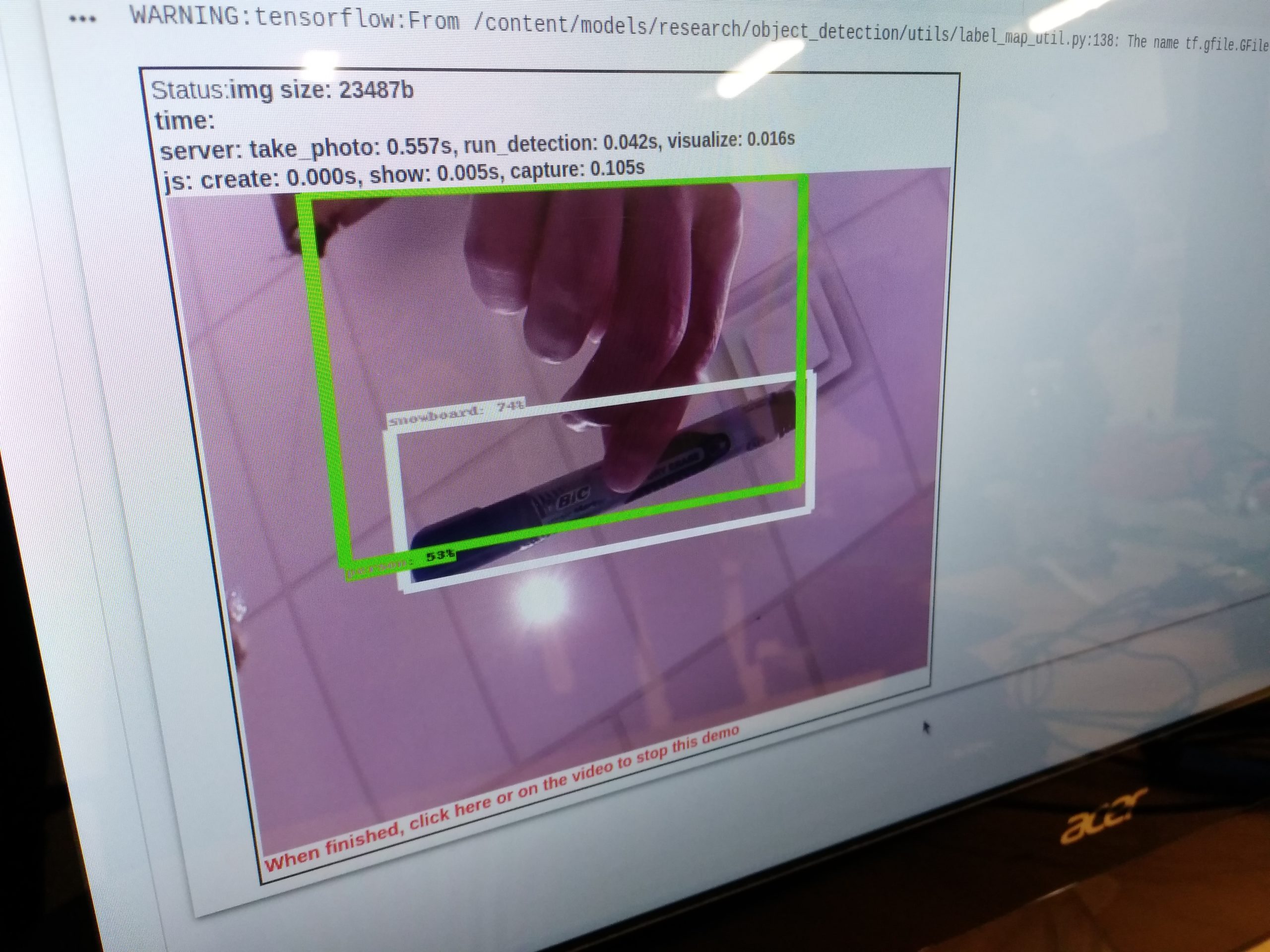
There was a good amount of progress that culminated this week!The uOttawa group got Tensorflow object detection working with the IR camera attached to the RPi! We were able to see what the objects were being detected as. This was just using the standard MobileNet model, and there were results such as surfboard in there too.
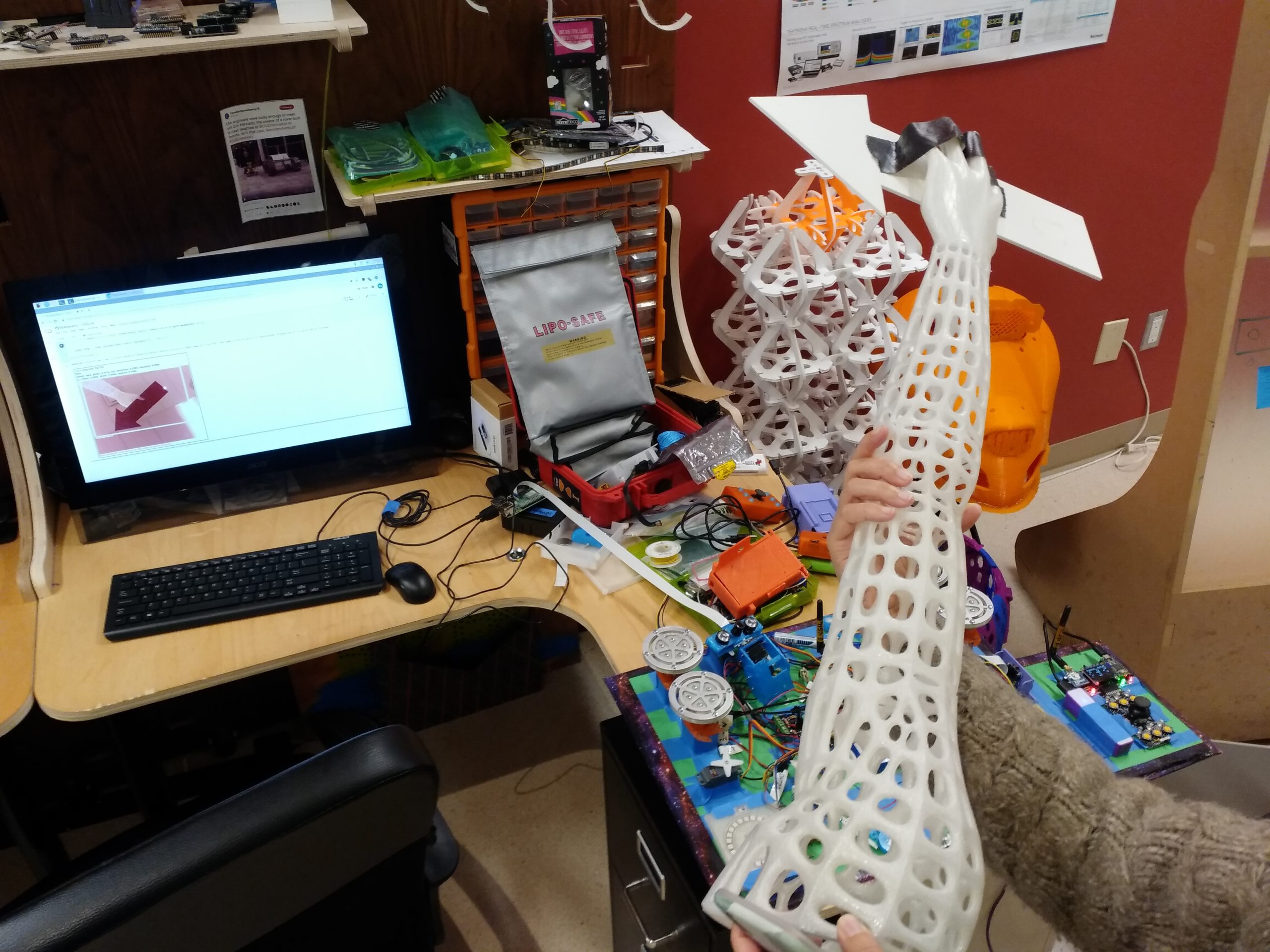
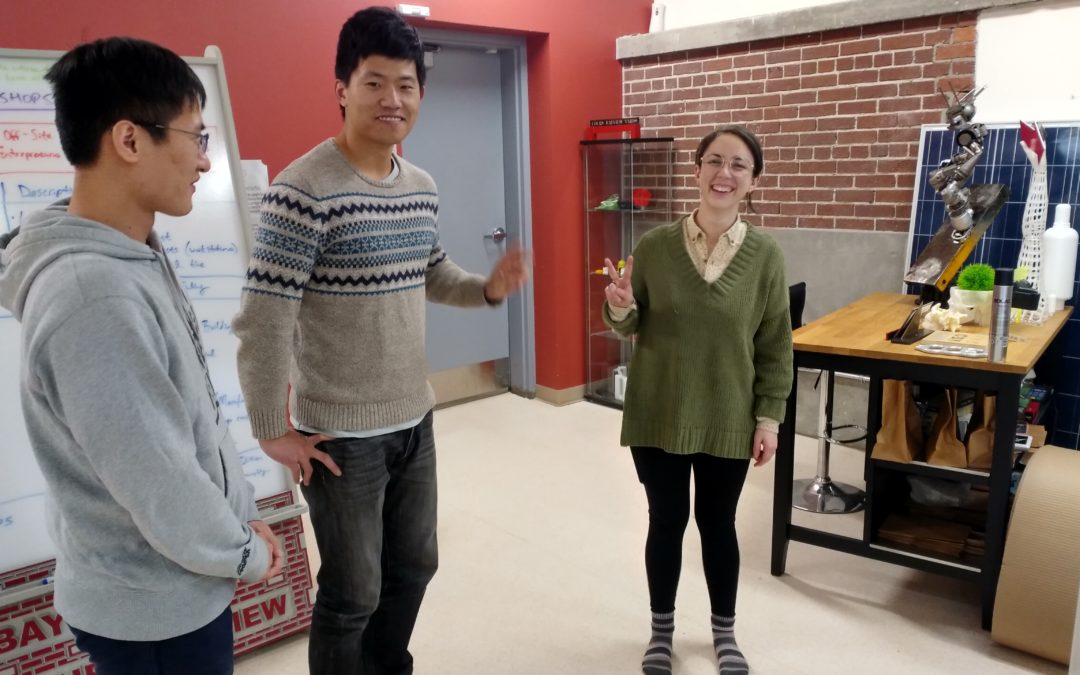
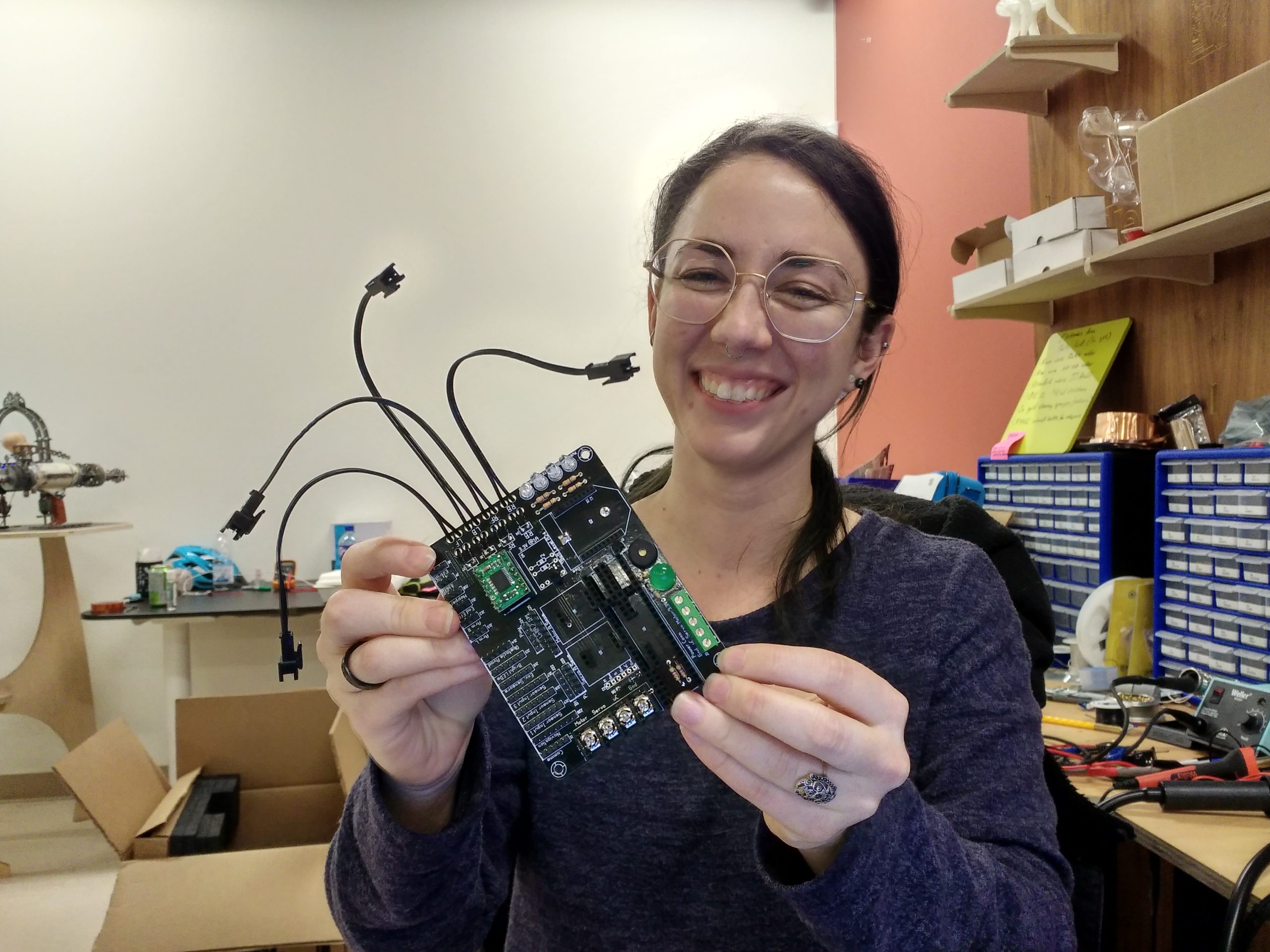
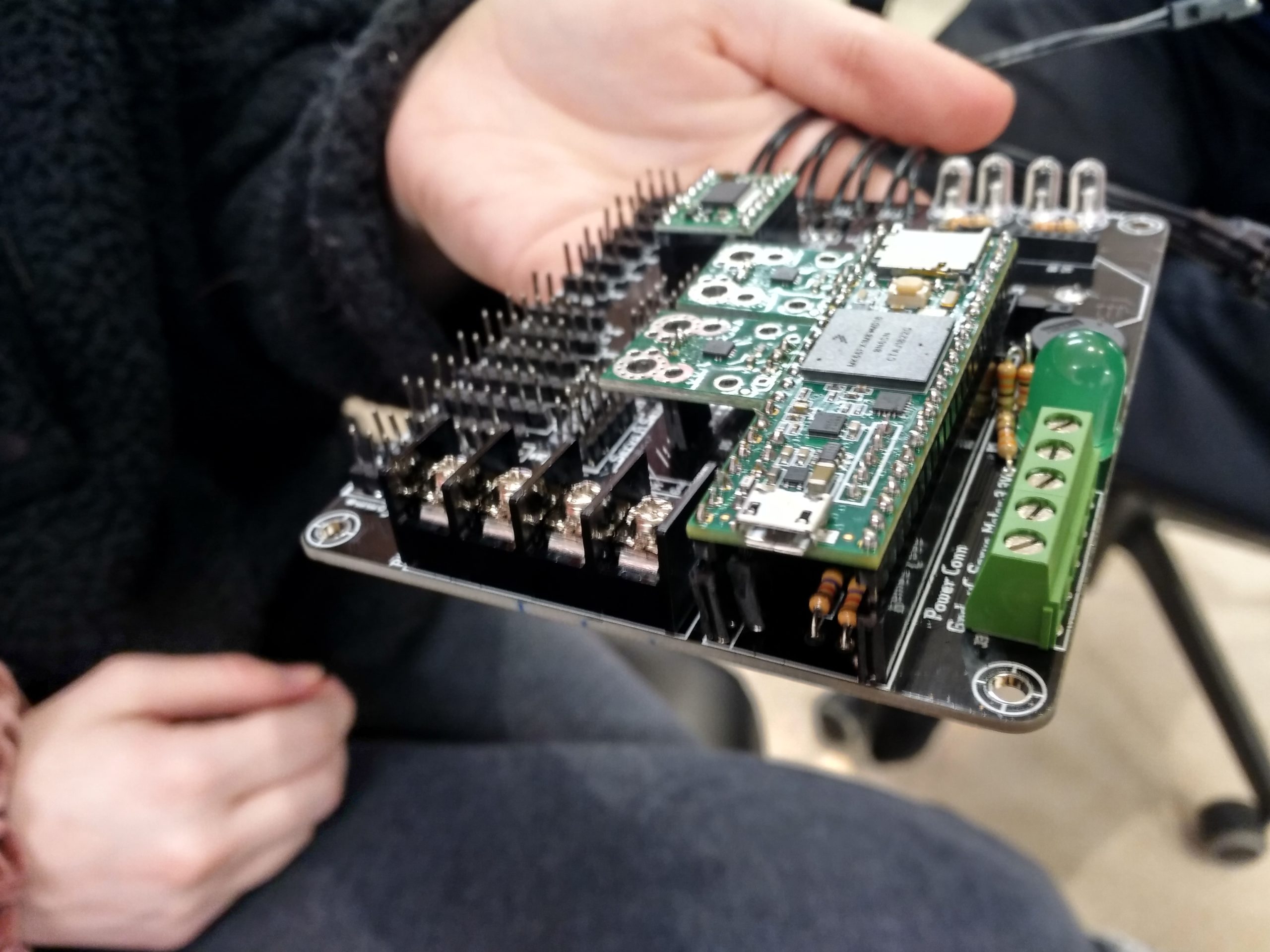
Beck completed the Bowie Brain Kit! It is now completely soldered. Next step is programming the first blink! As well, we had the chance to meet someone new, Queenie, who was interested in learning more about Robot Missions.
Hooray! It’s great to see it when progress meets a milestone. Congrats to the uOttawa team!
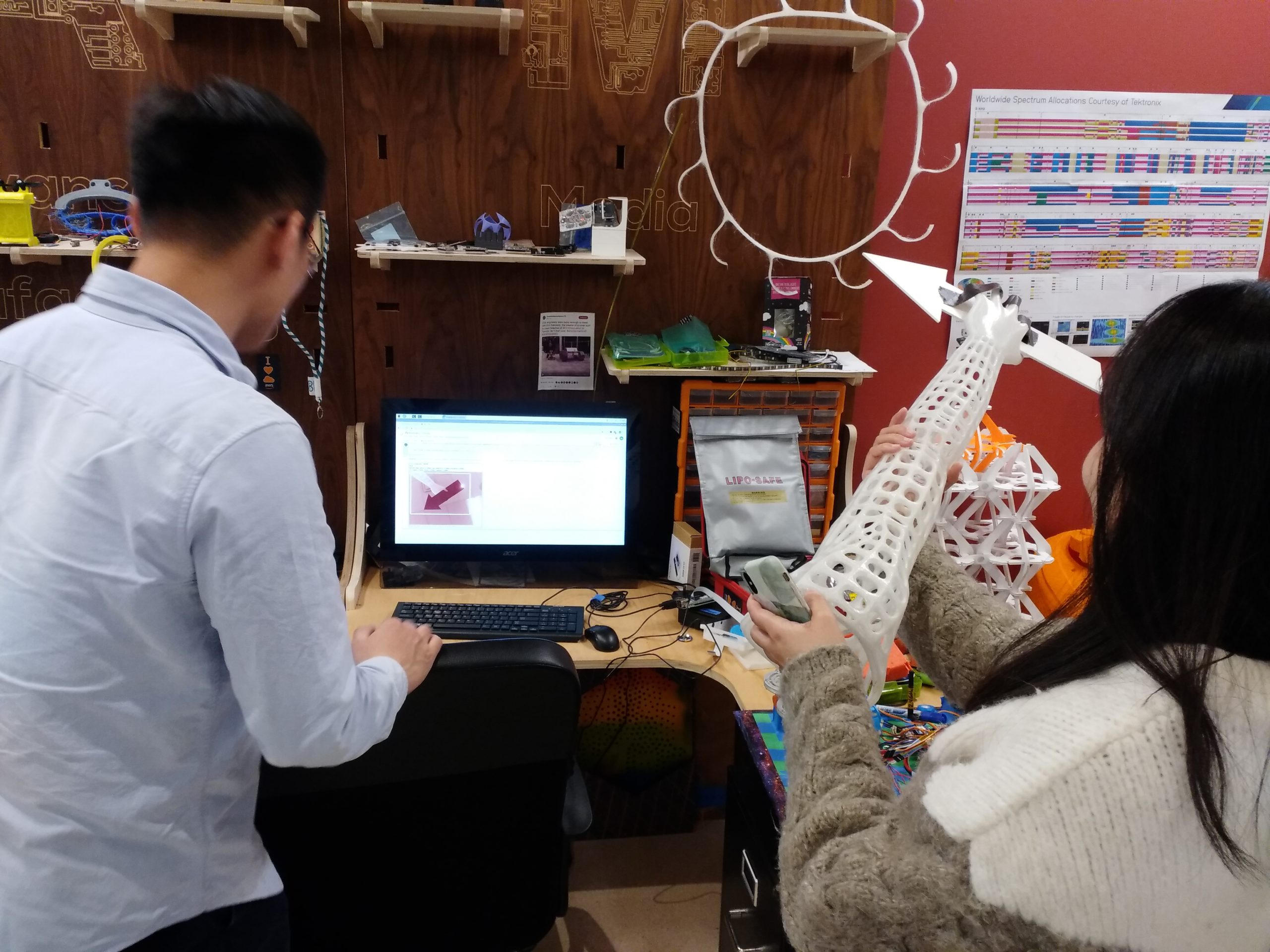
Meeting Queenie, who’s also interested in environmental robotics
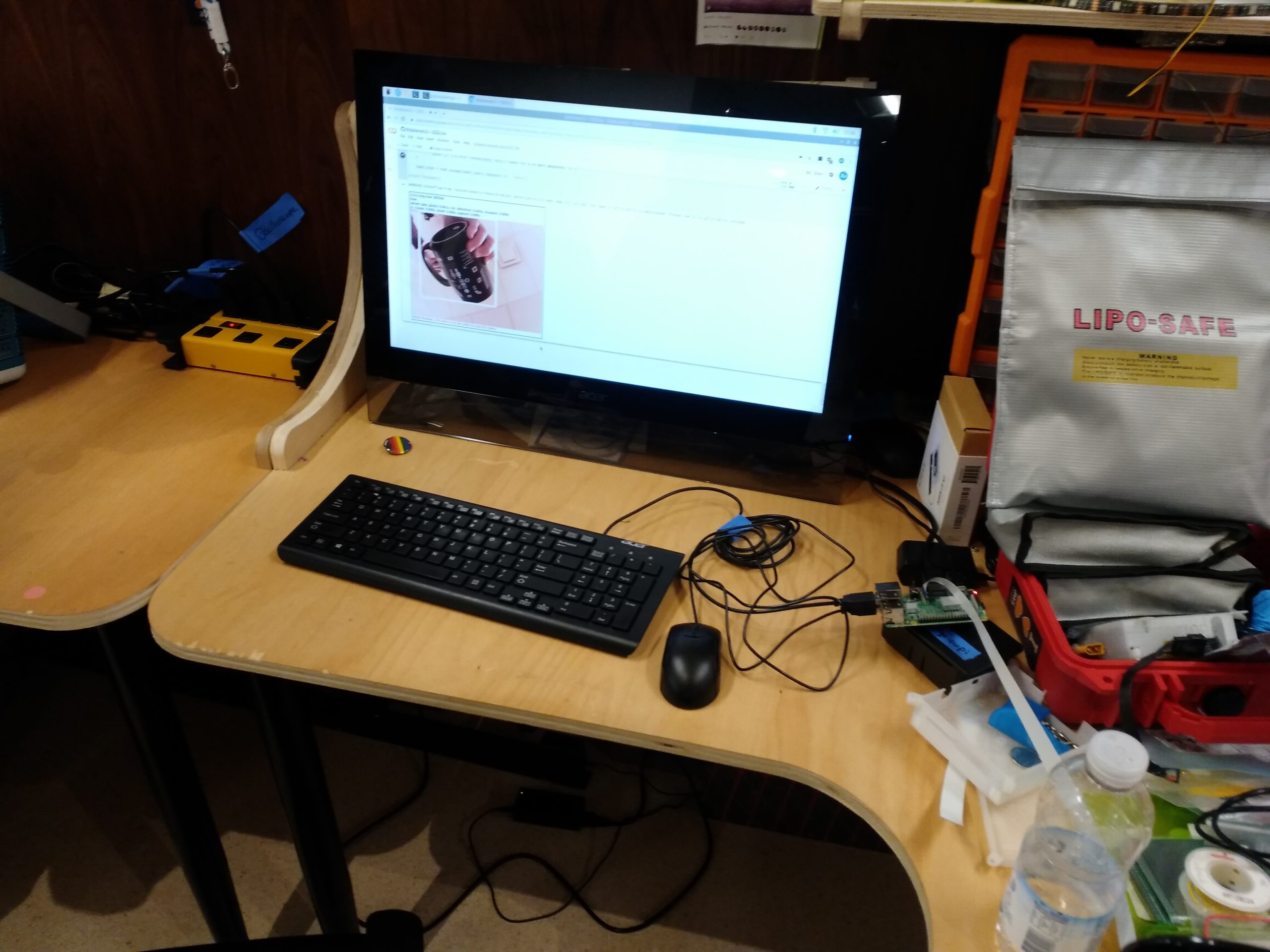
Tensorflow is running!
Hello! Tensorflow!
Now setting up the RPi
We ran into an issue with this wifi, but switched to another and it worked
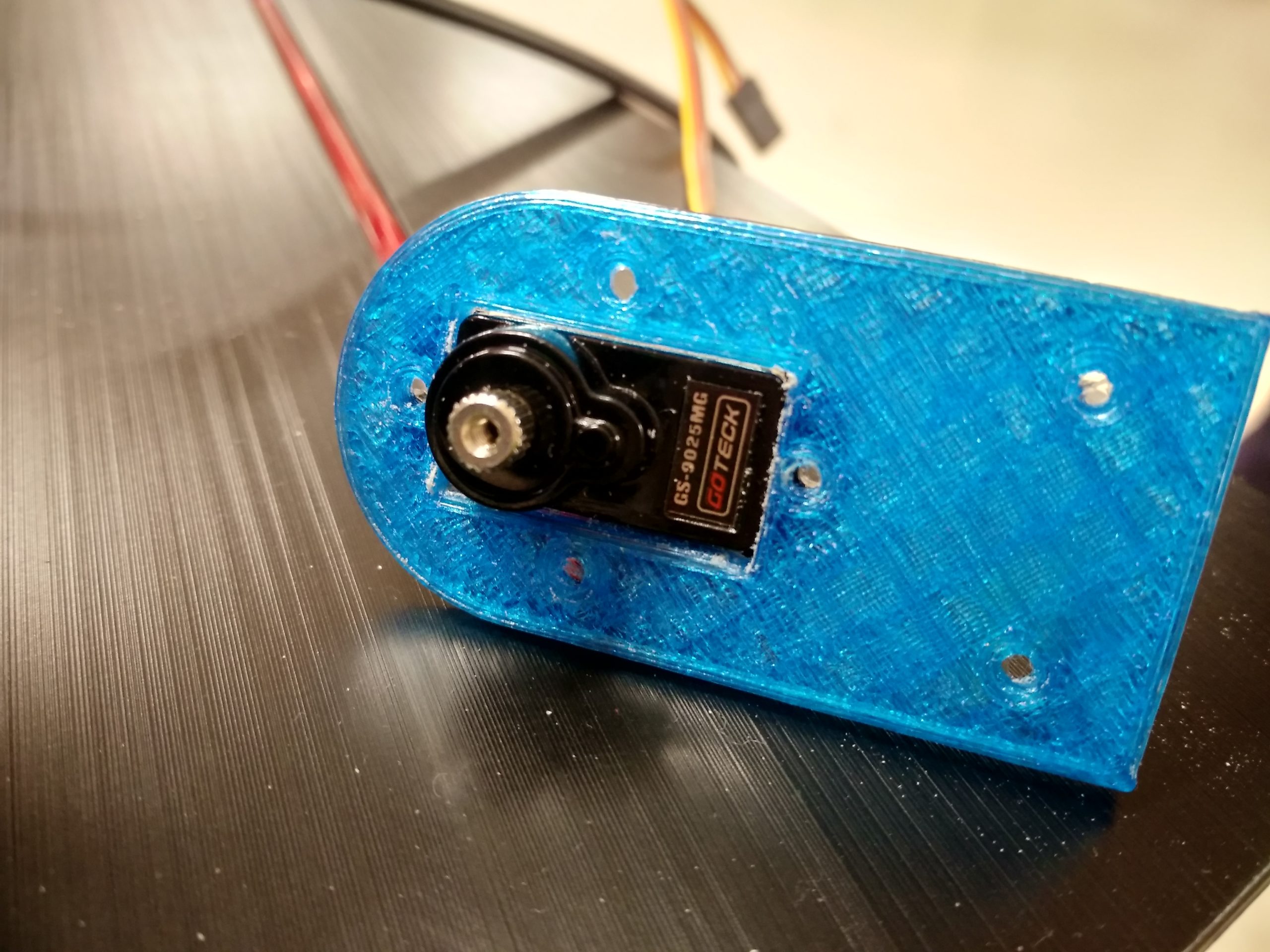
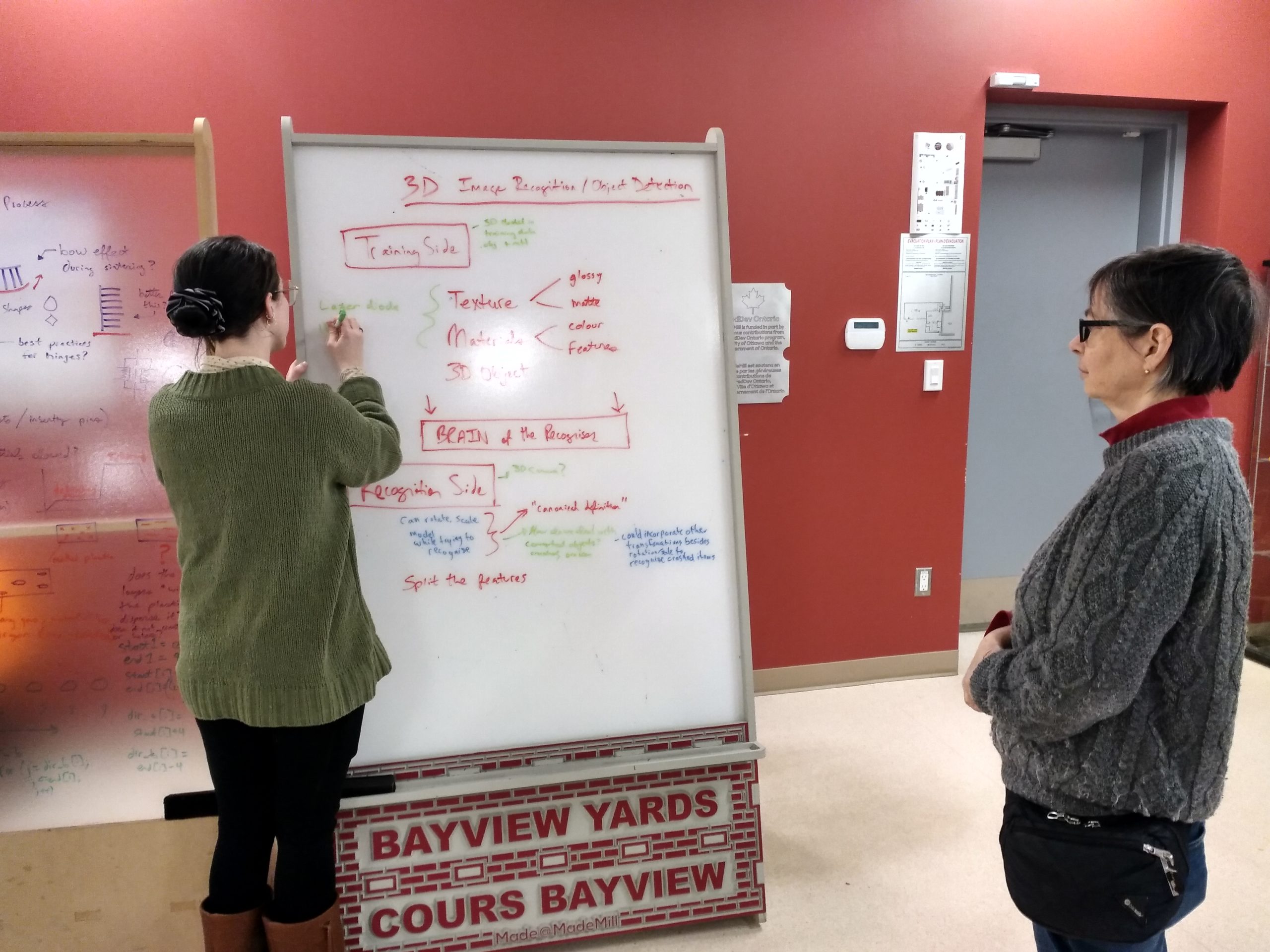
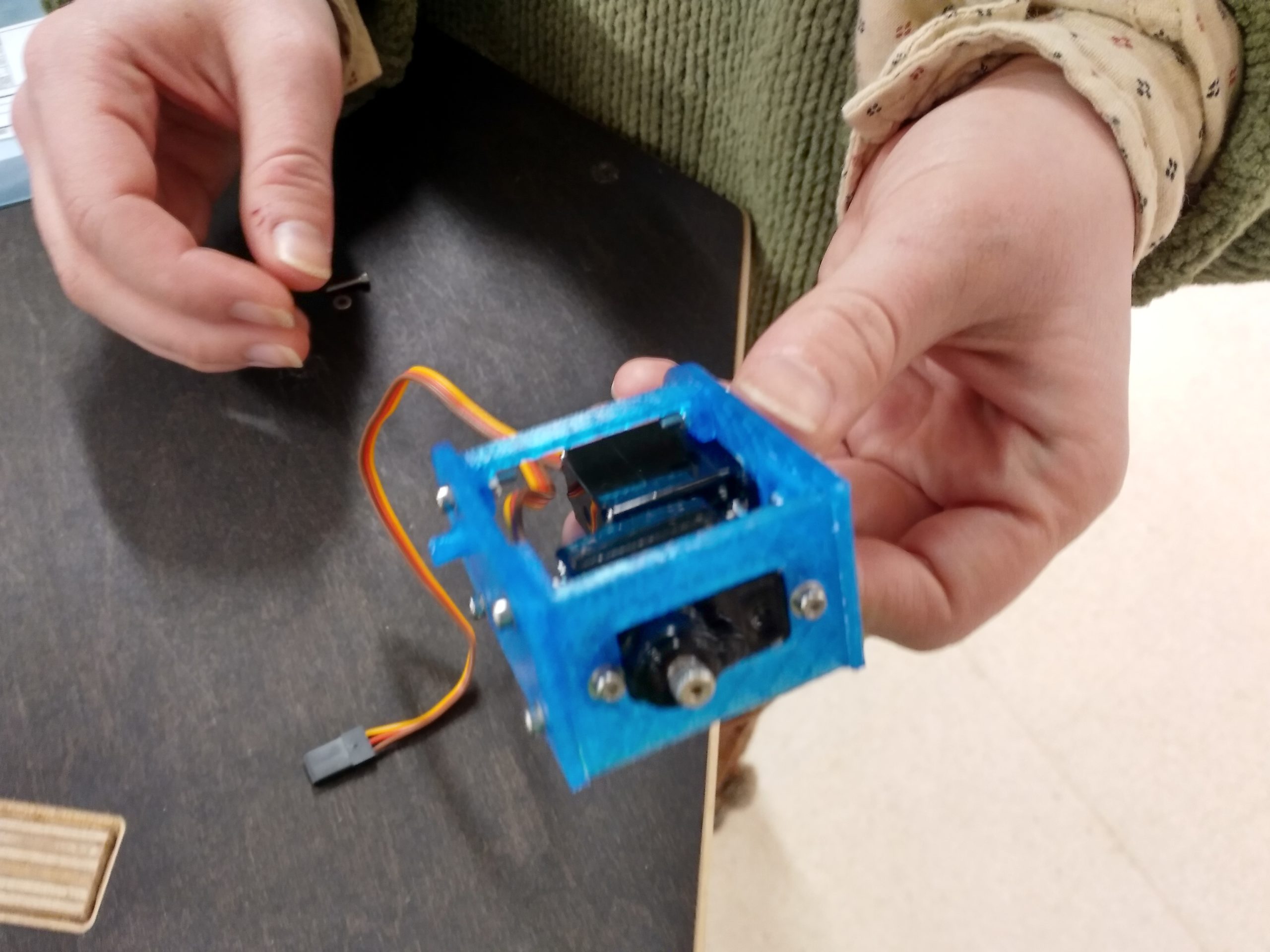
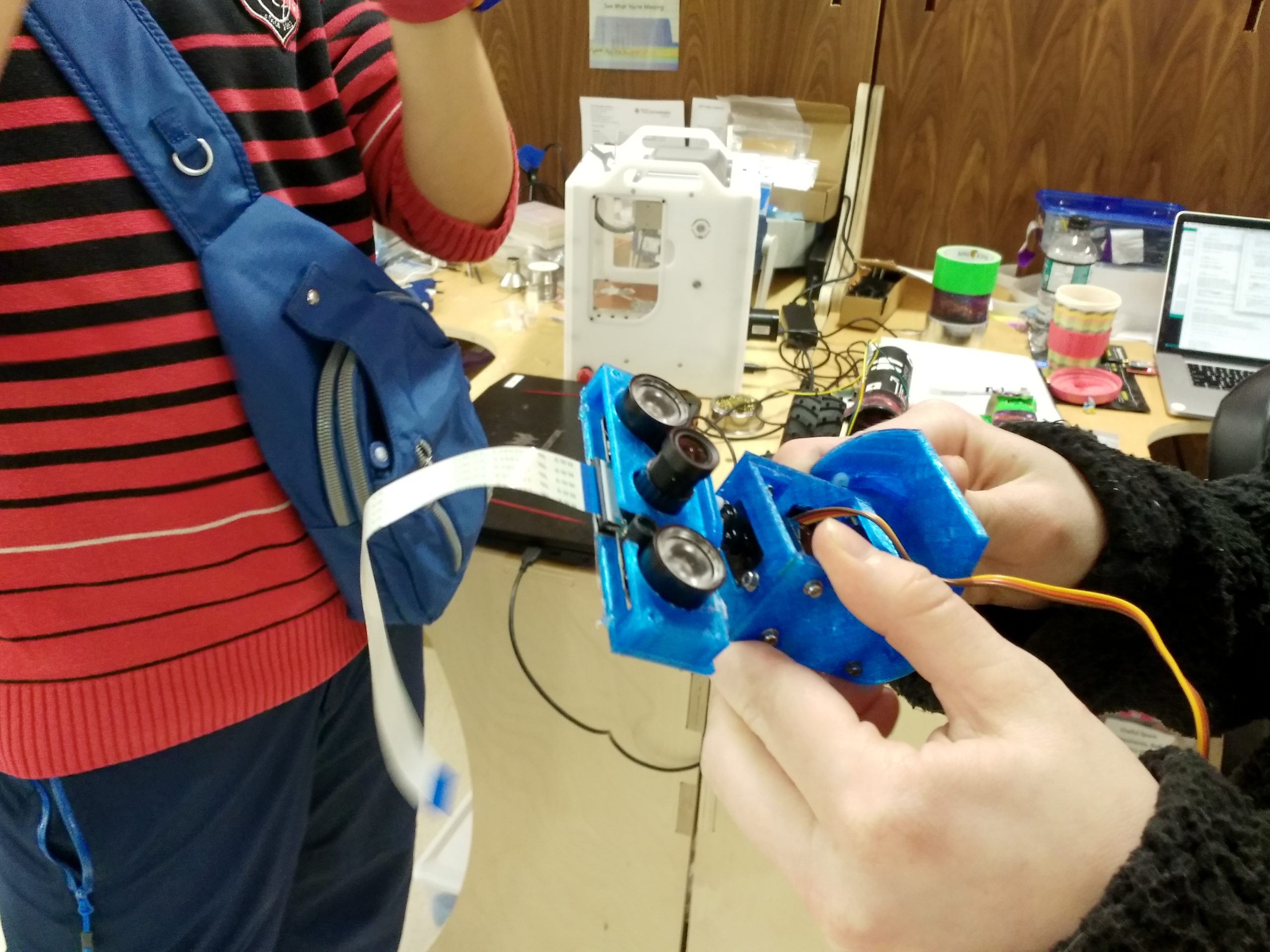
The uOttawa Masters Engineering group made progress on 3D printing the pan-tilt mechanism for the IR camera. Beck gave a tutorial to the group on how to 3D print with the Tinkerines and how to slice the models. Meanwhile, another member of their group worked on installing Tensorflow on the Raspberry Pi. The servos fit perfectly into the mount, and it gets assembled with M2 screws. Beck and Brenda made progress on their Bowie Brain Kits as well. Brenda had a thought about a 3D object detection method, so we brainstormed a bit about that on the whiteboard. Next steps is to continue the work.
Beck and some of the uOttawa team
Jessica from uOttawa working on installing Tensorflow
Servos fit in 3D print!
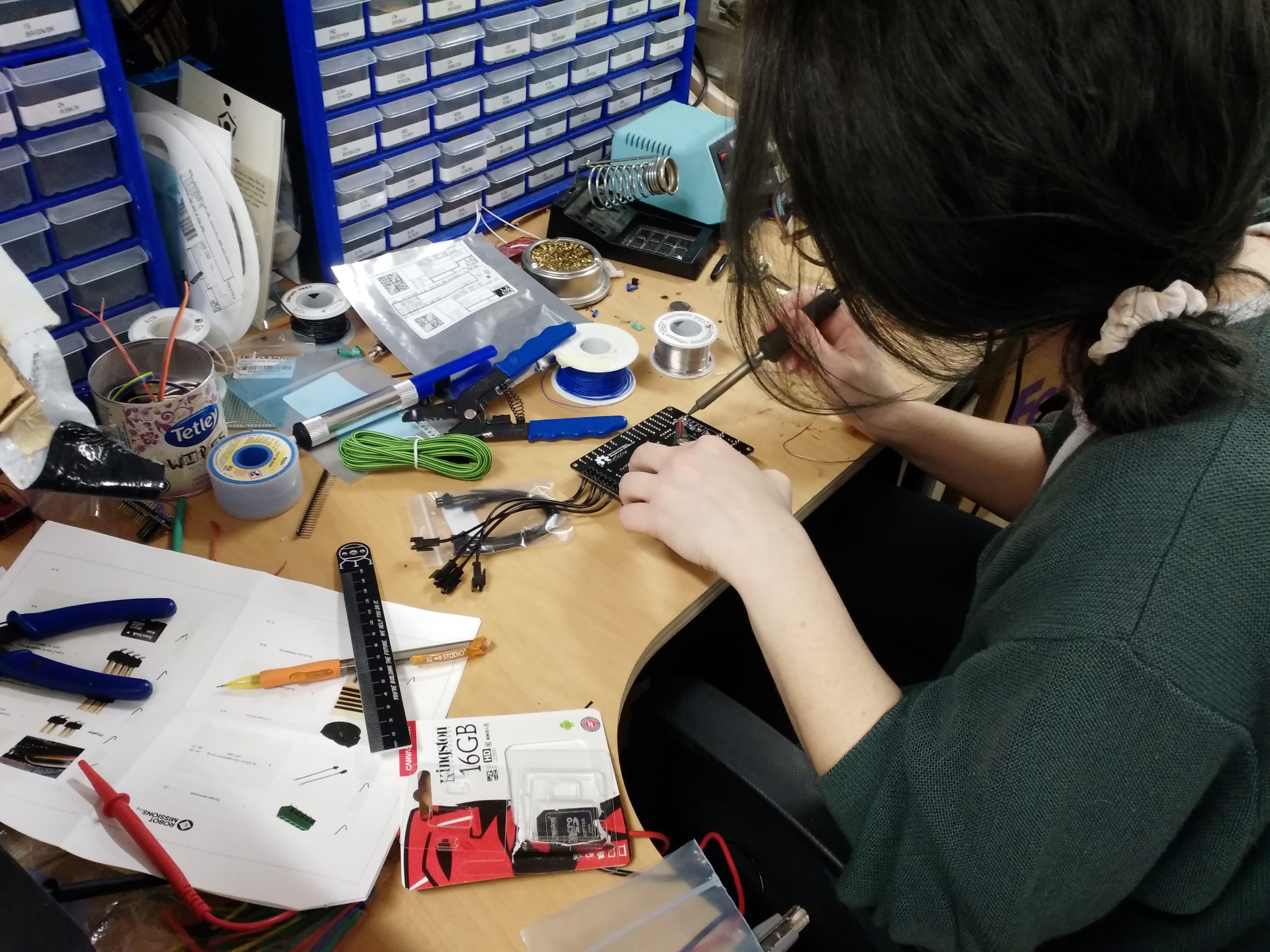
Brenda equipped and ready to solder
Brainstorming how 3D object detection method could work
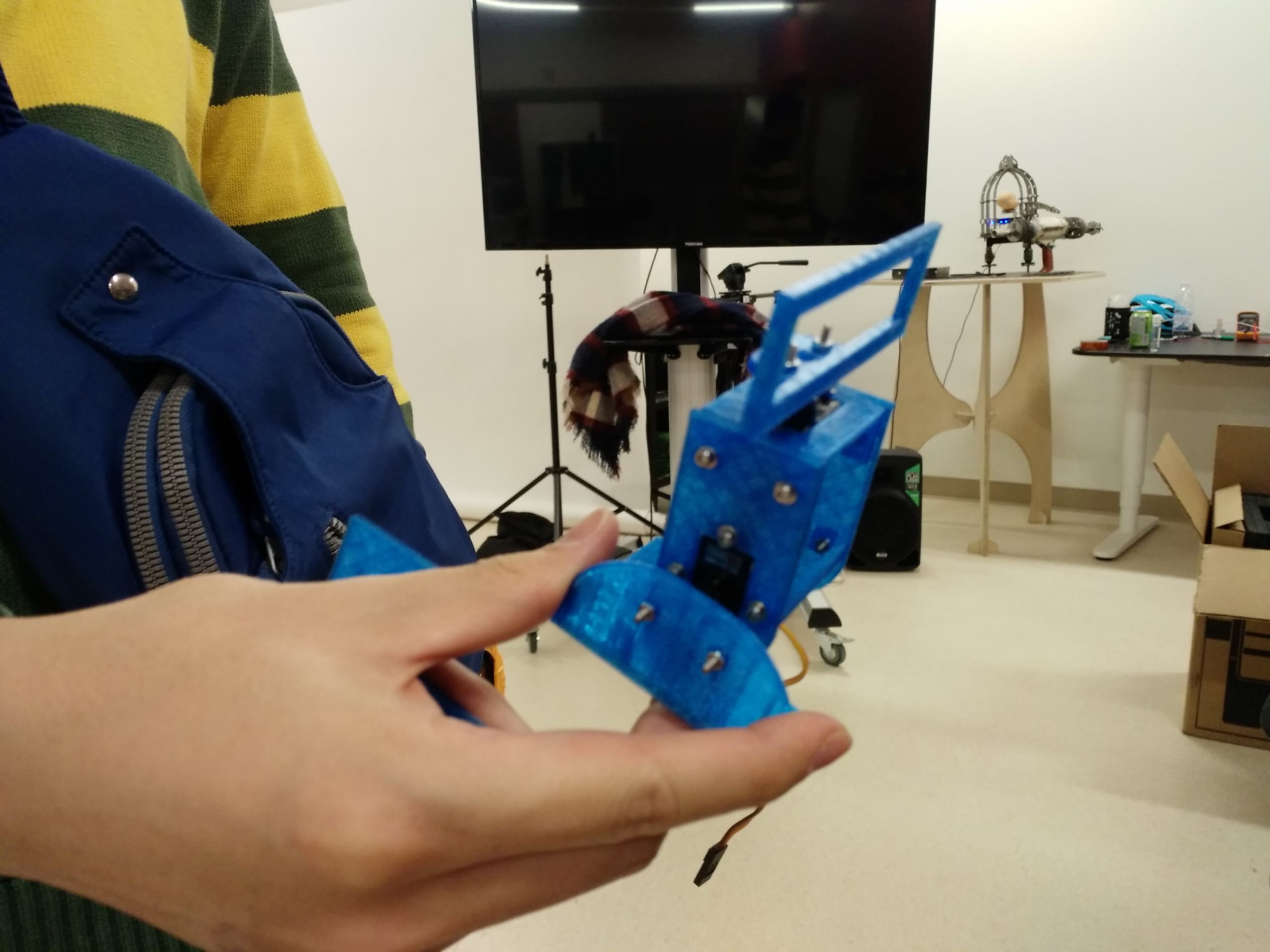
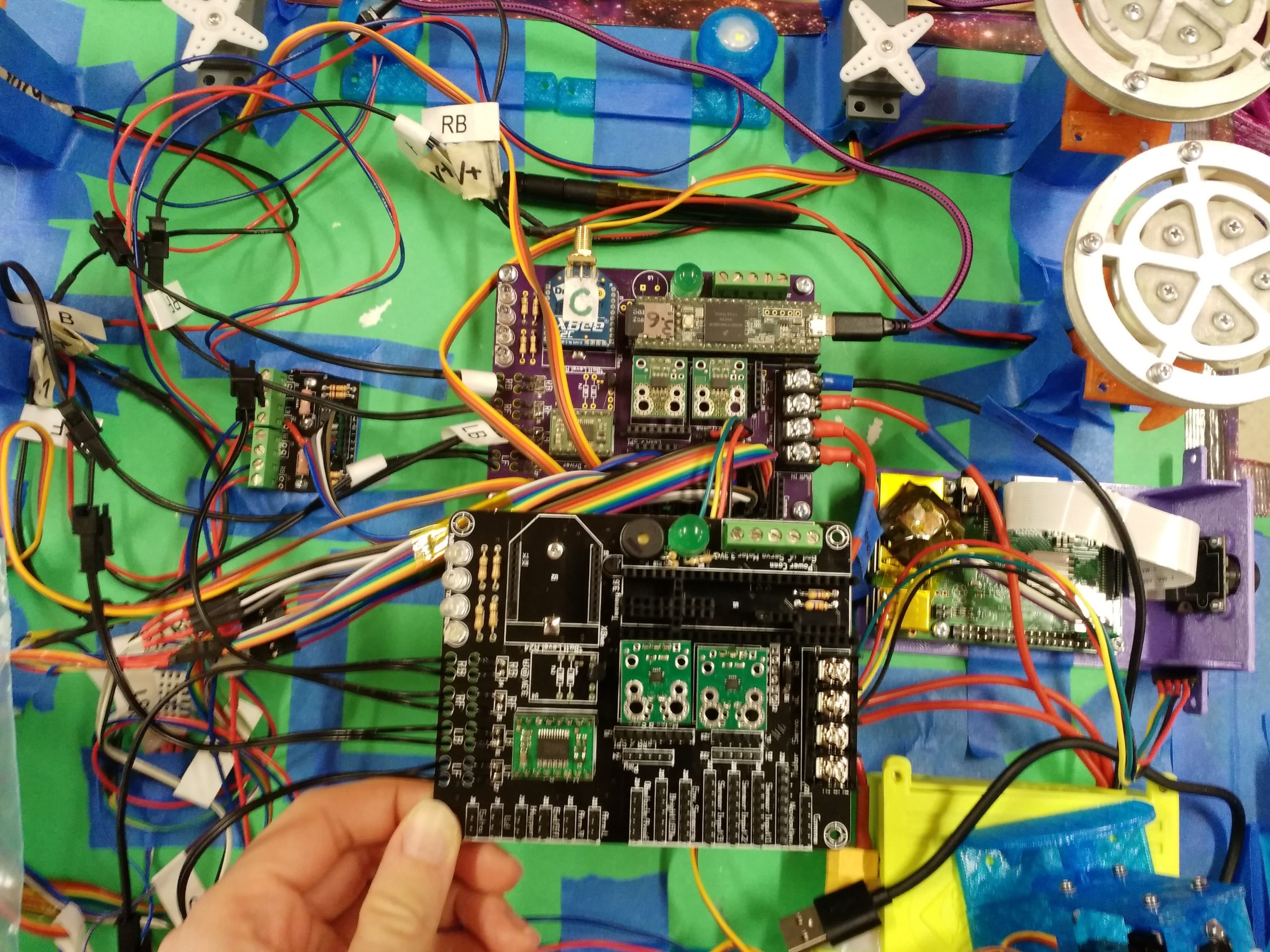
Tonight the groups continued on the progress. The pan-tilt servo connections were added to the Bowie brain board. The pan-tilt mechanism was assembled. Test code was written to make sure the pan-tilt works. Beck added the motor wires to the brain kit. It’s interesting to see how less dusty / sandy the brain is when new.
Jessica checking the pan-tilt wires
Pan-tilt assembled
Motor wires added
Comparing the dust / sand free Bowie brain to the one that’s been in the field
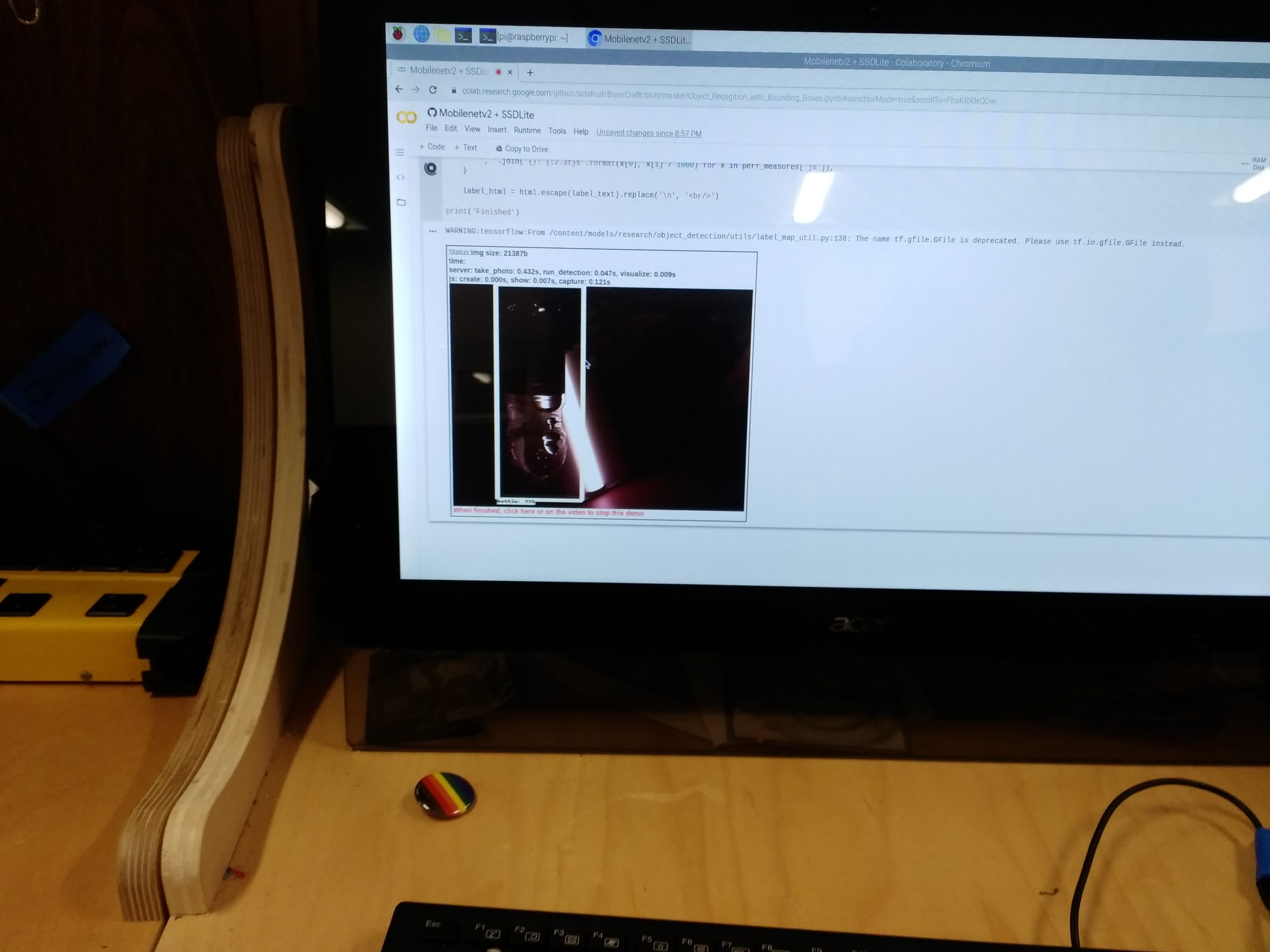
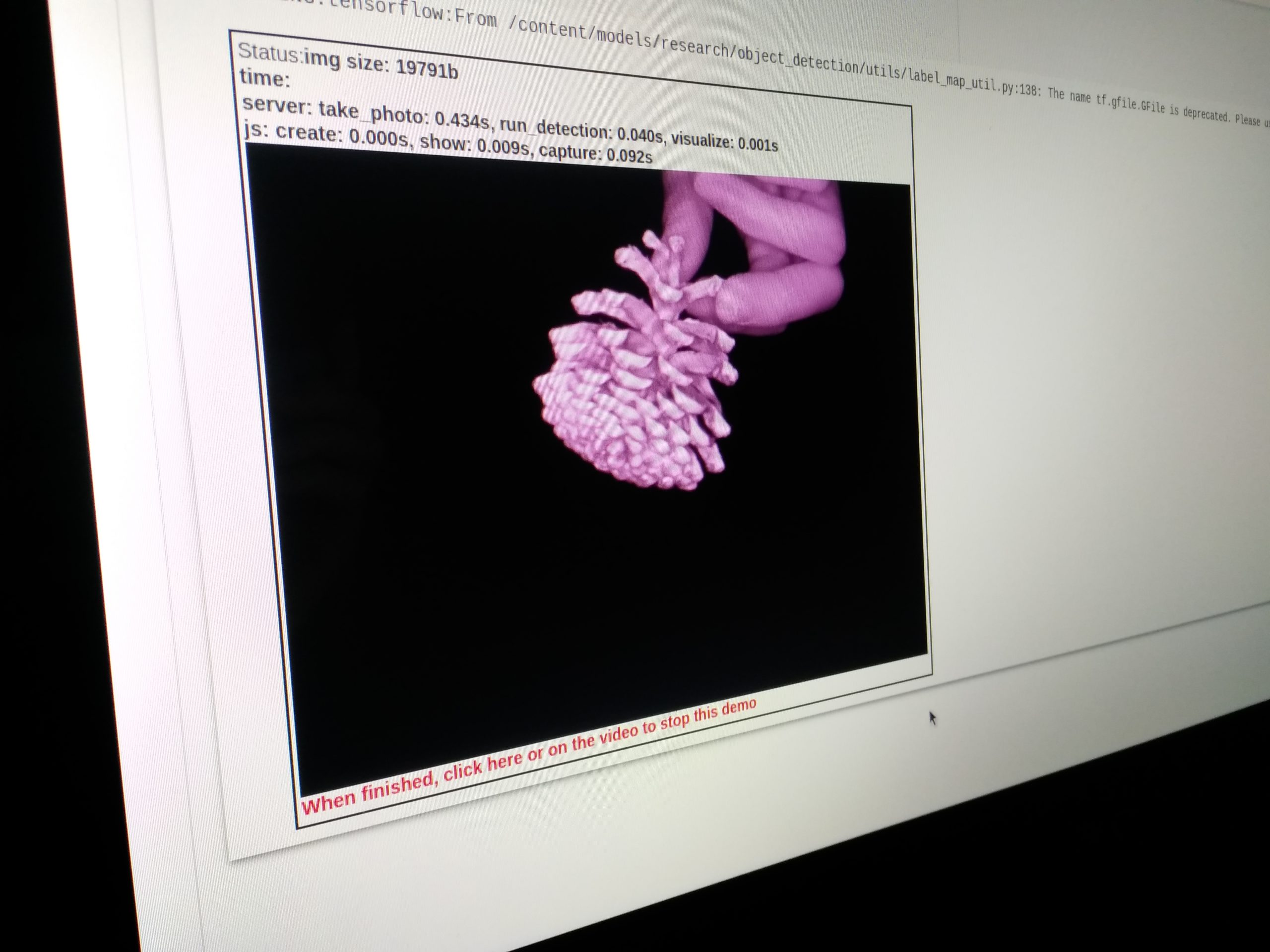
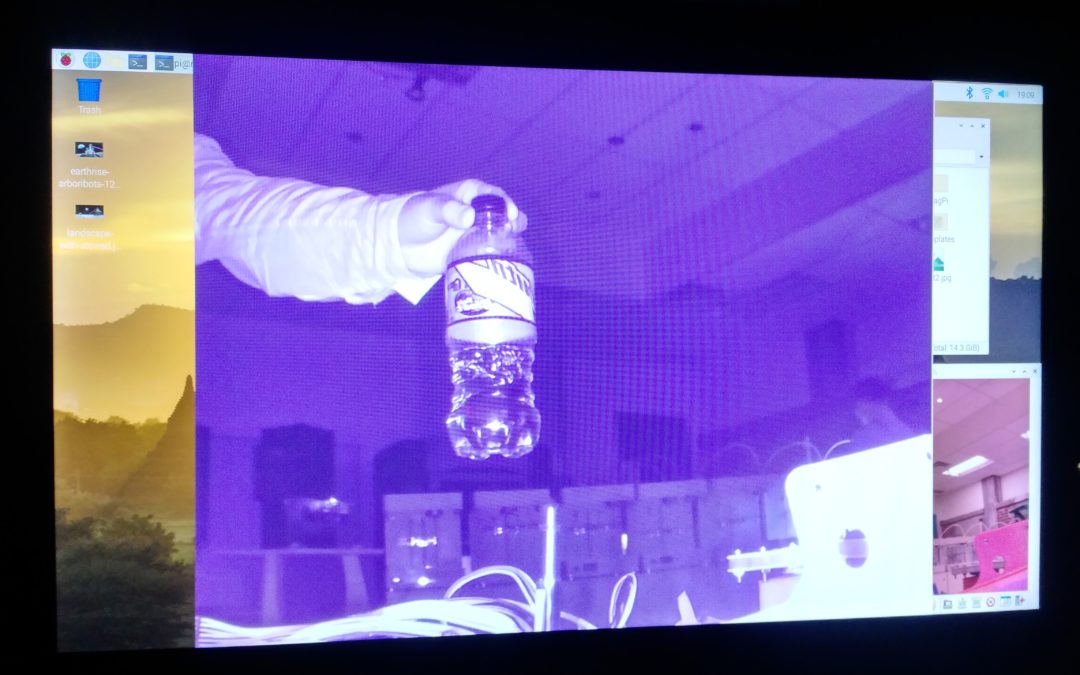
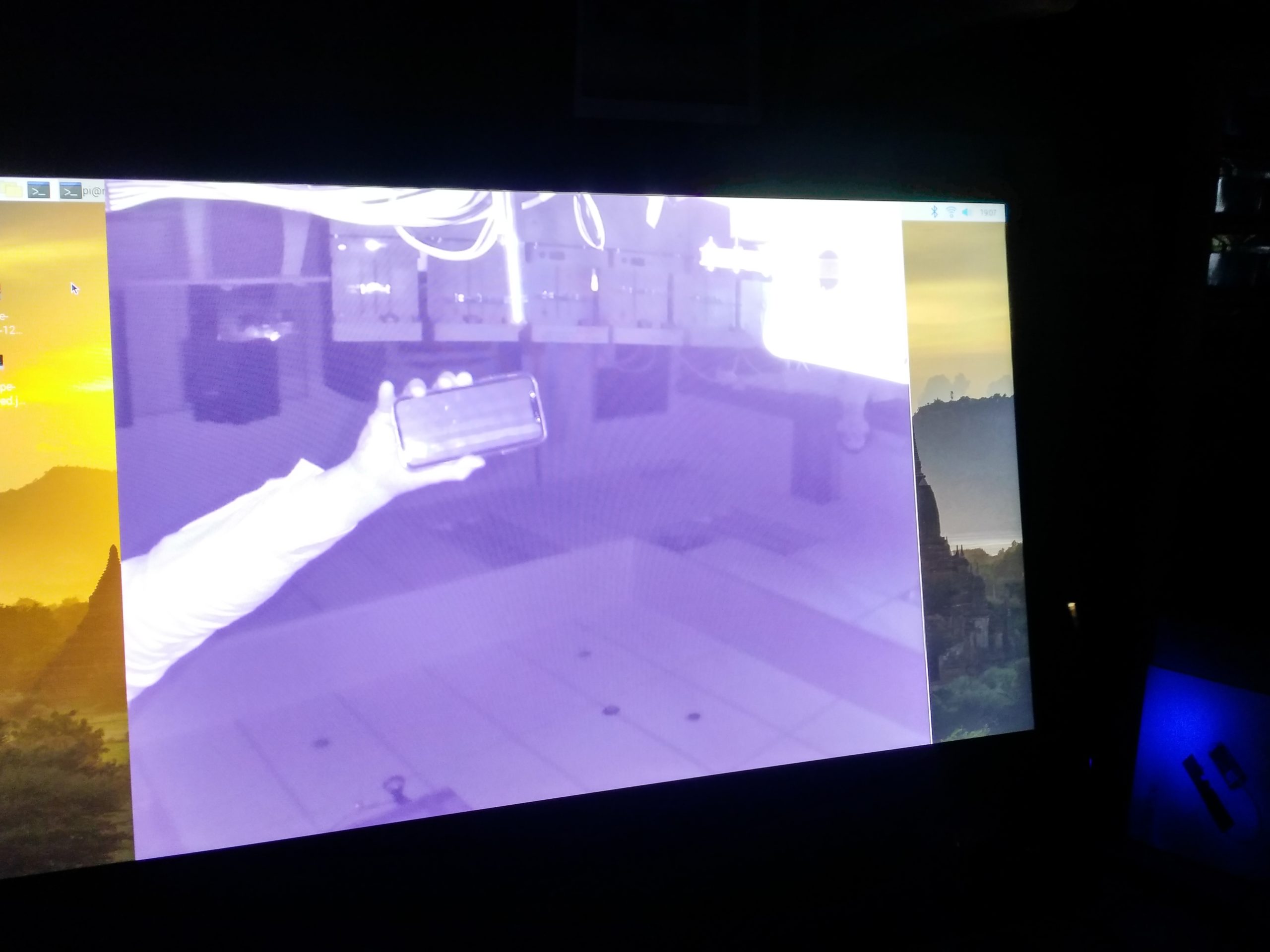
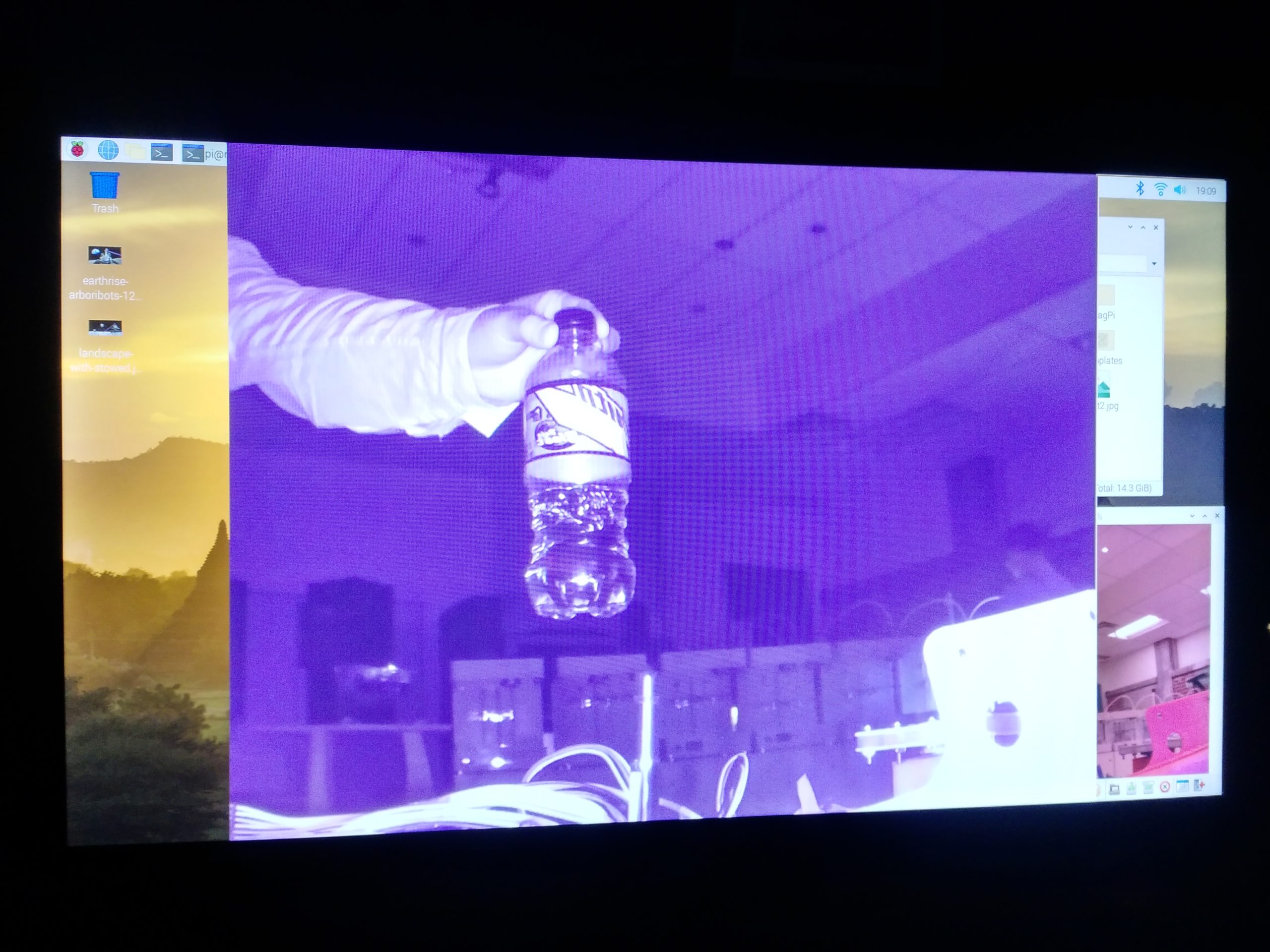
Tonight the uOttawa group tested the IR camera. They connected it to the Raspberry Pi, and took pictures with it using raspistill. The test images were showing some objects with the overhead lights on and off. The IR leds that are beside the camera do a good job at illuminating the objects when the overhead lights are off. This progress showed that the IR images can be captured, and the next step is to pass them to Tensorflow for object detection. Beck added the headers to the Teensy 3.6 and inserted it in to the Bowie Brain.
Here’s part 2 of the beta brain kit progress! Tonight Beck and Brenda were soldering many of the headers needed for this board, taking approximately 3 hours. Watch the video snippet update here
Some of the bugs found this week were:
Overview:
Might want to mention about having a micro USB cable that can do sync
Part 5, Step 16 – Rephrase 4x 5 pins, so they can all be cut at once. Had to sand F headers to fit
Part 5, Step 25 – Two right-most holes for the current sensor
Part 5, Step 26 – ‘All available pads’, not quite
They are making great progress and finding useful bugs to improve on in the instructions. I think that next week they will be pretty close to getting set with installing the Teensy and Arduino software to program the board with its first blink! Want to see part 1 of the progress? Check it out here
![Collab Log #010: [VIDEO] Water bottle detected! (in IR)](https://www.robotmissions.org/site/wp-content/uploads/2020/03/IMG_20200311_211935-1080x675.jpg)