![Collab Log #010: [VIDEO] Water bottle detected! (in IR)](https://www.robotmissions.org/site/wp-content/uploads/2020/03/IMG_20200311_211935-1080x675.jpg)
Collab Log #010: [VIDEO] Water bottle detected! (in IR)
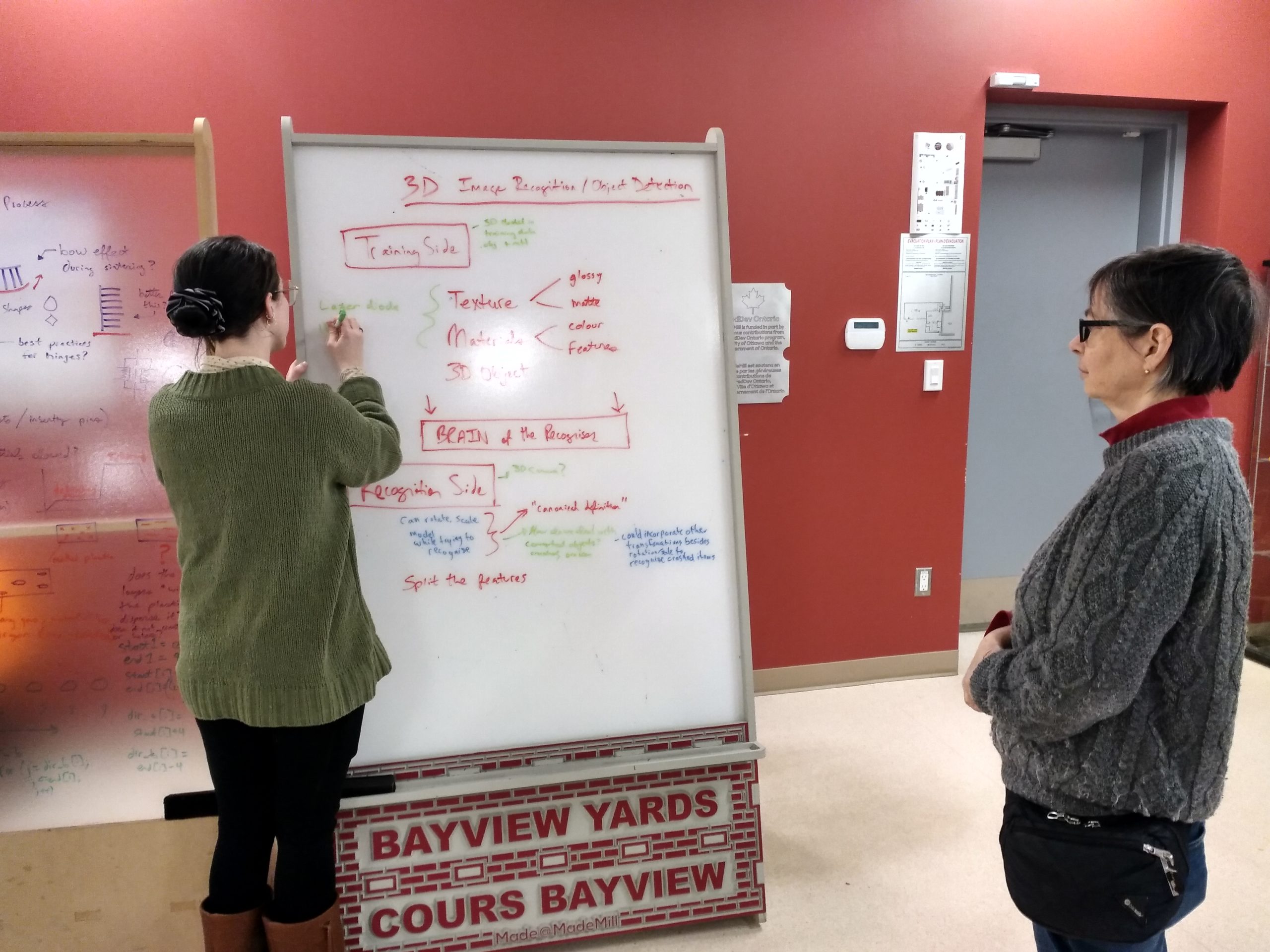
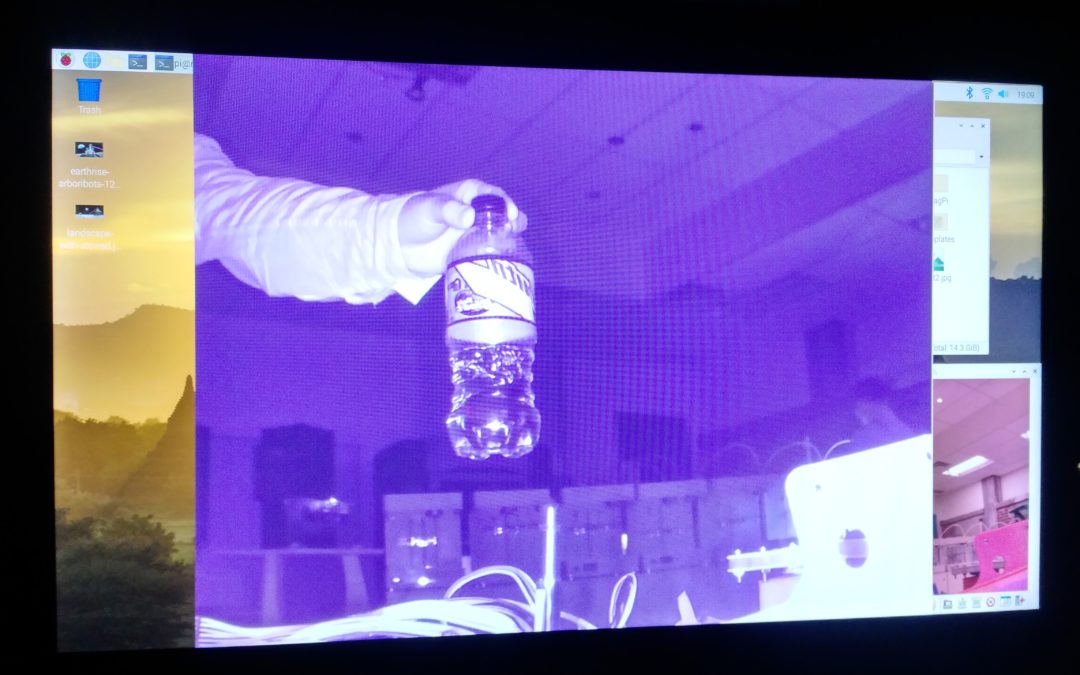
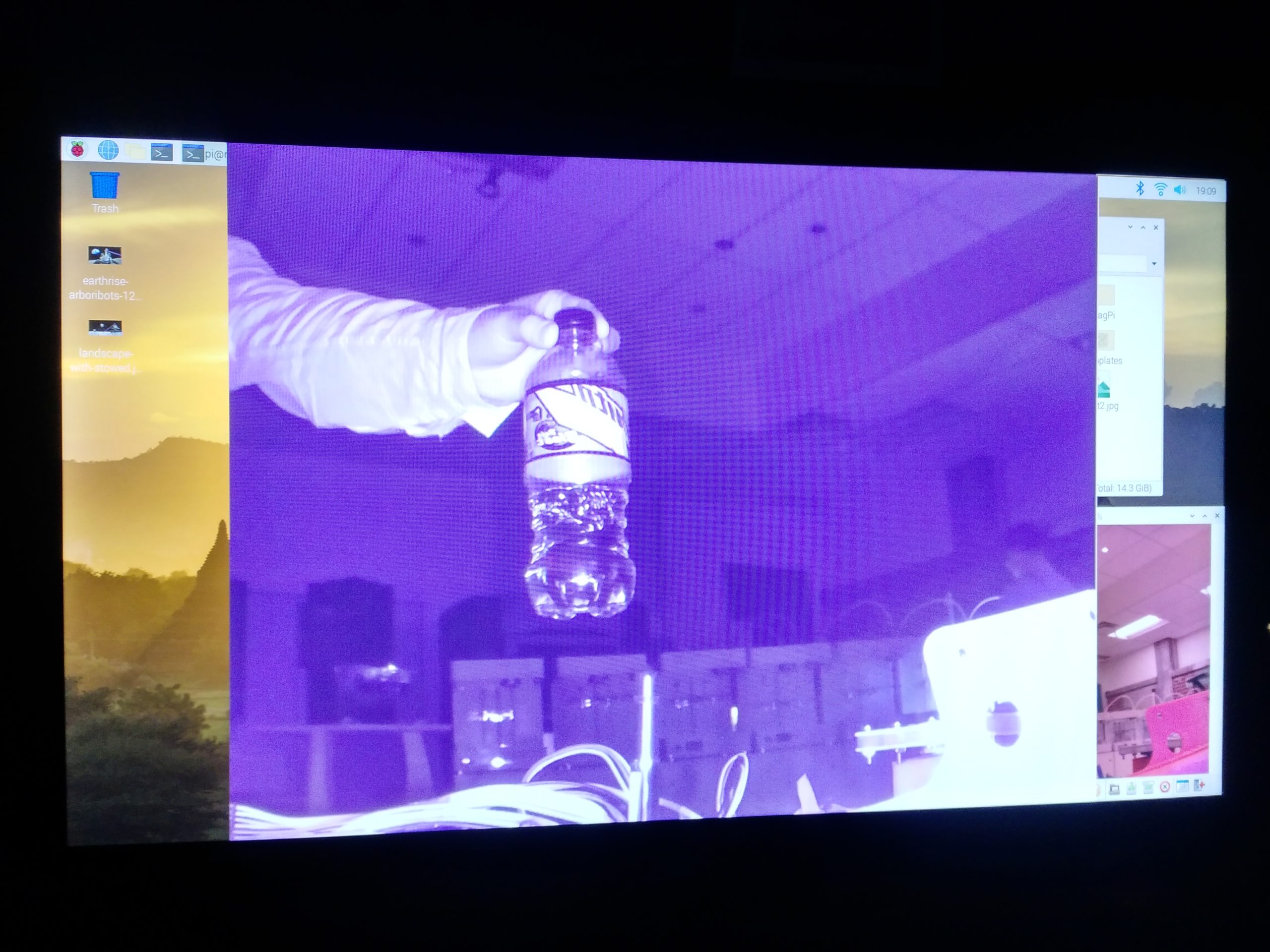
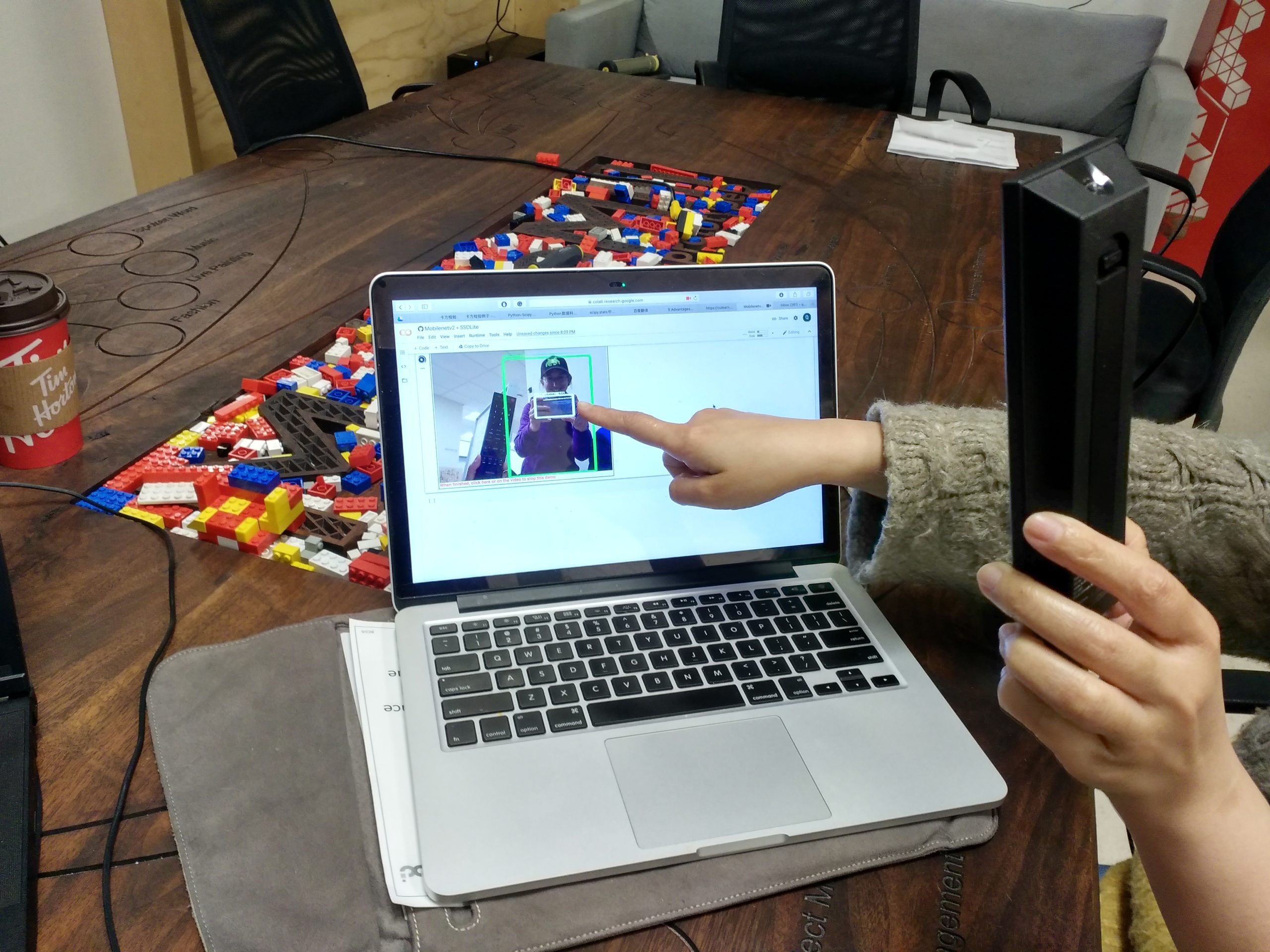
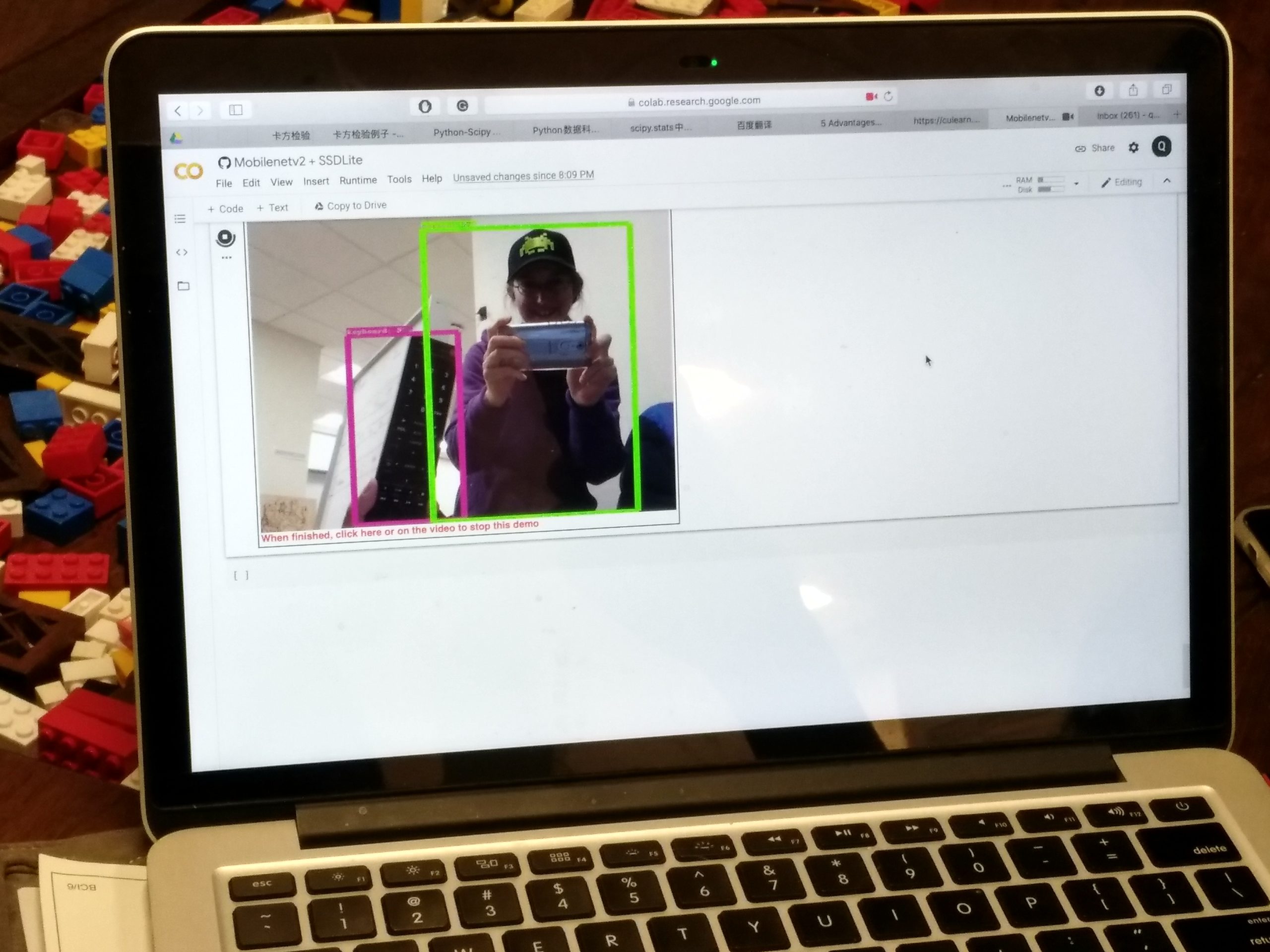
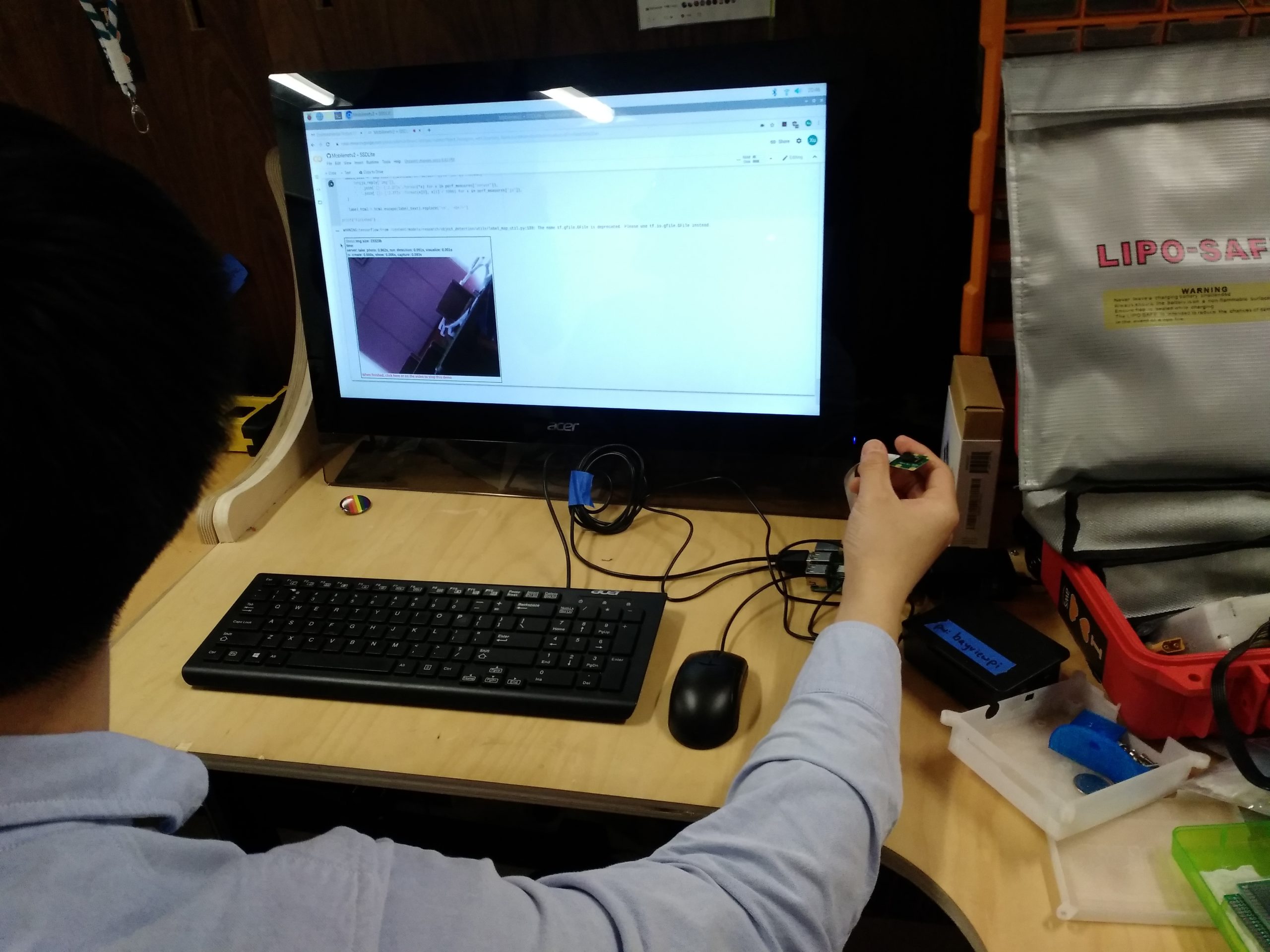
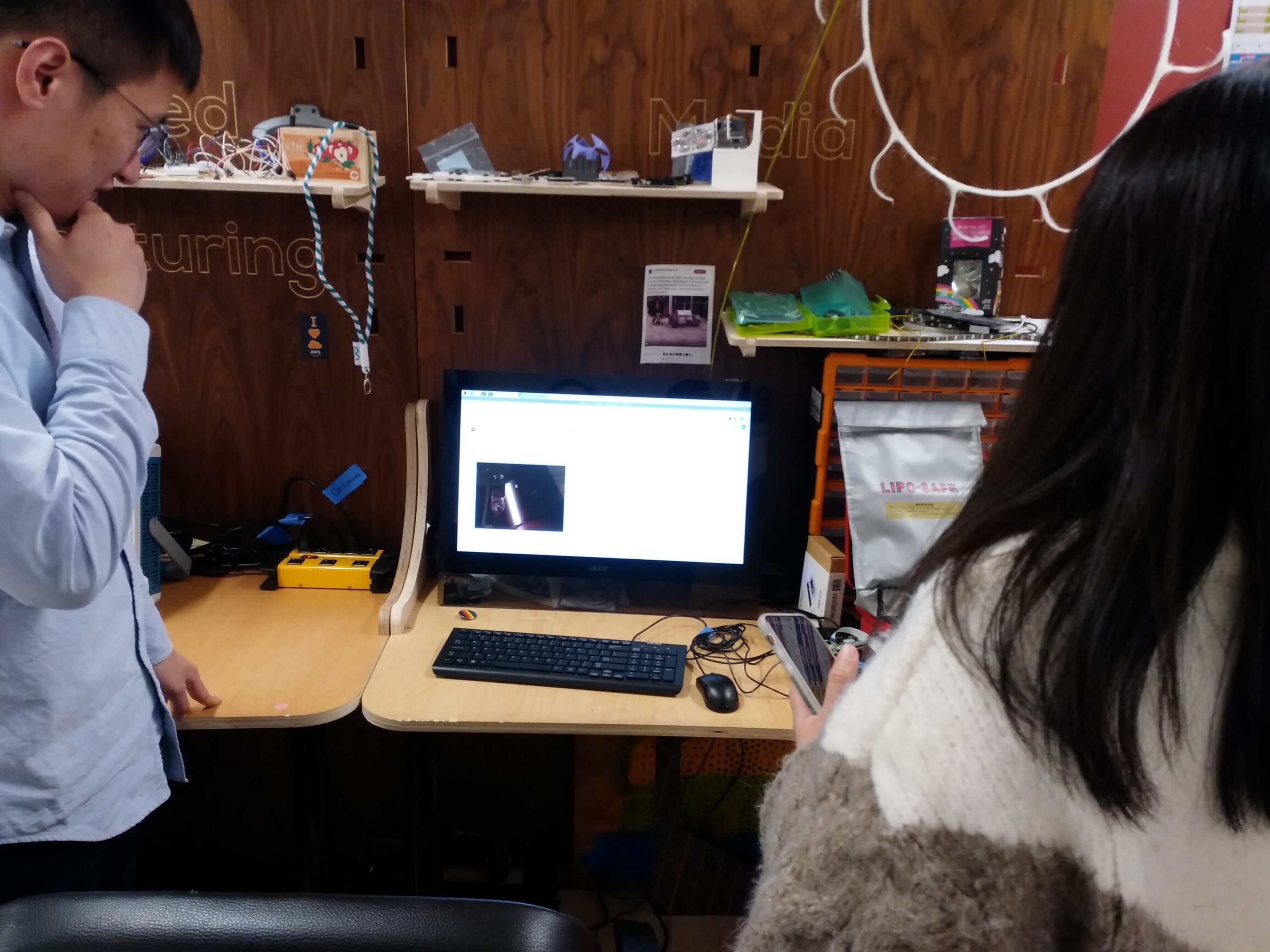
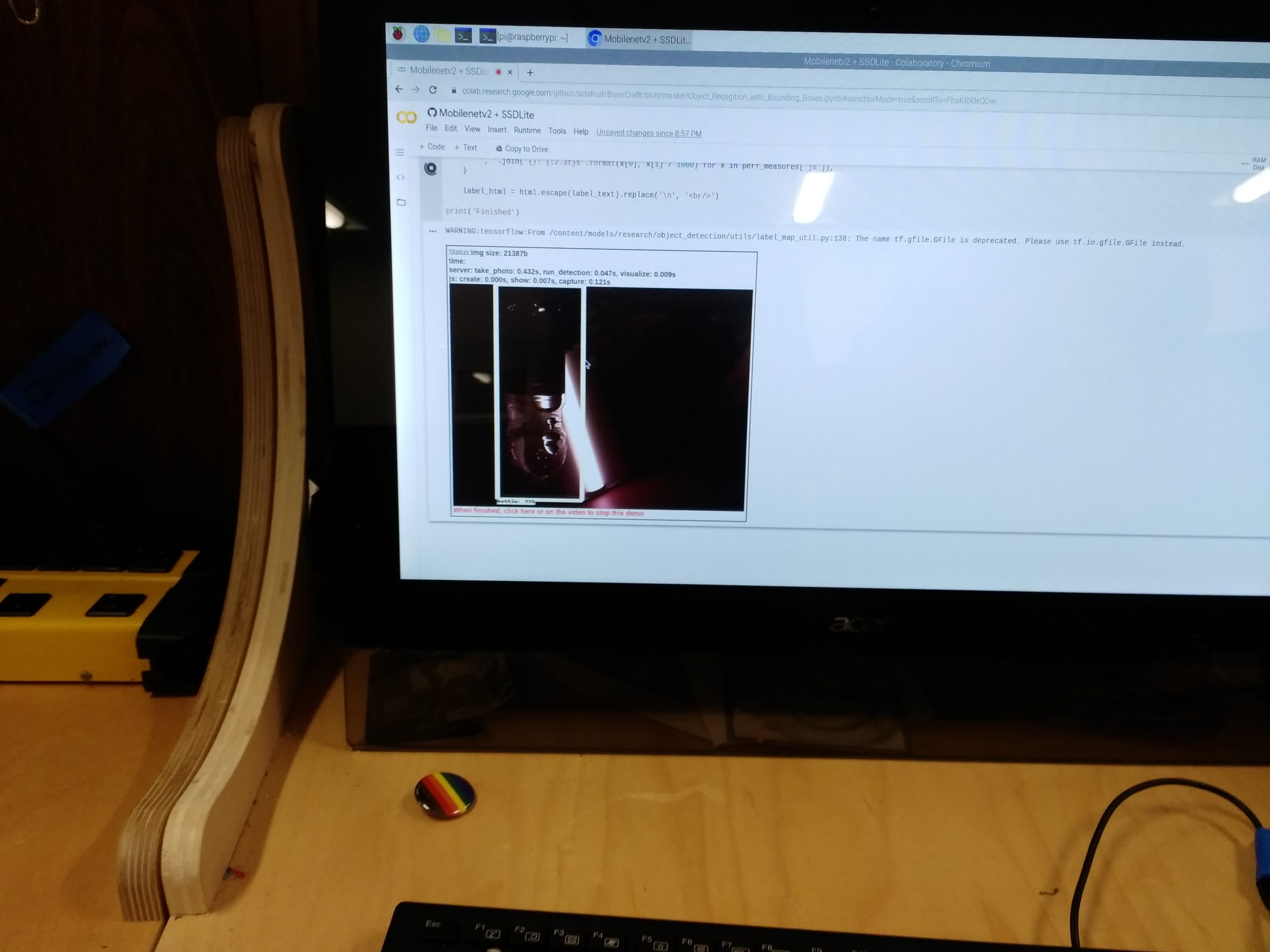
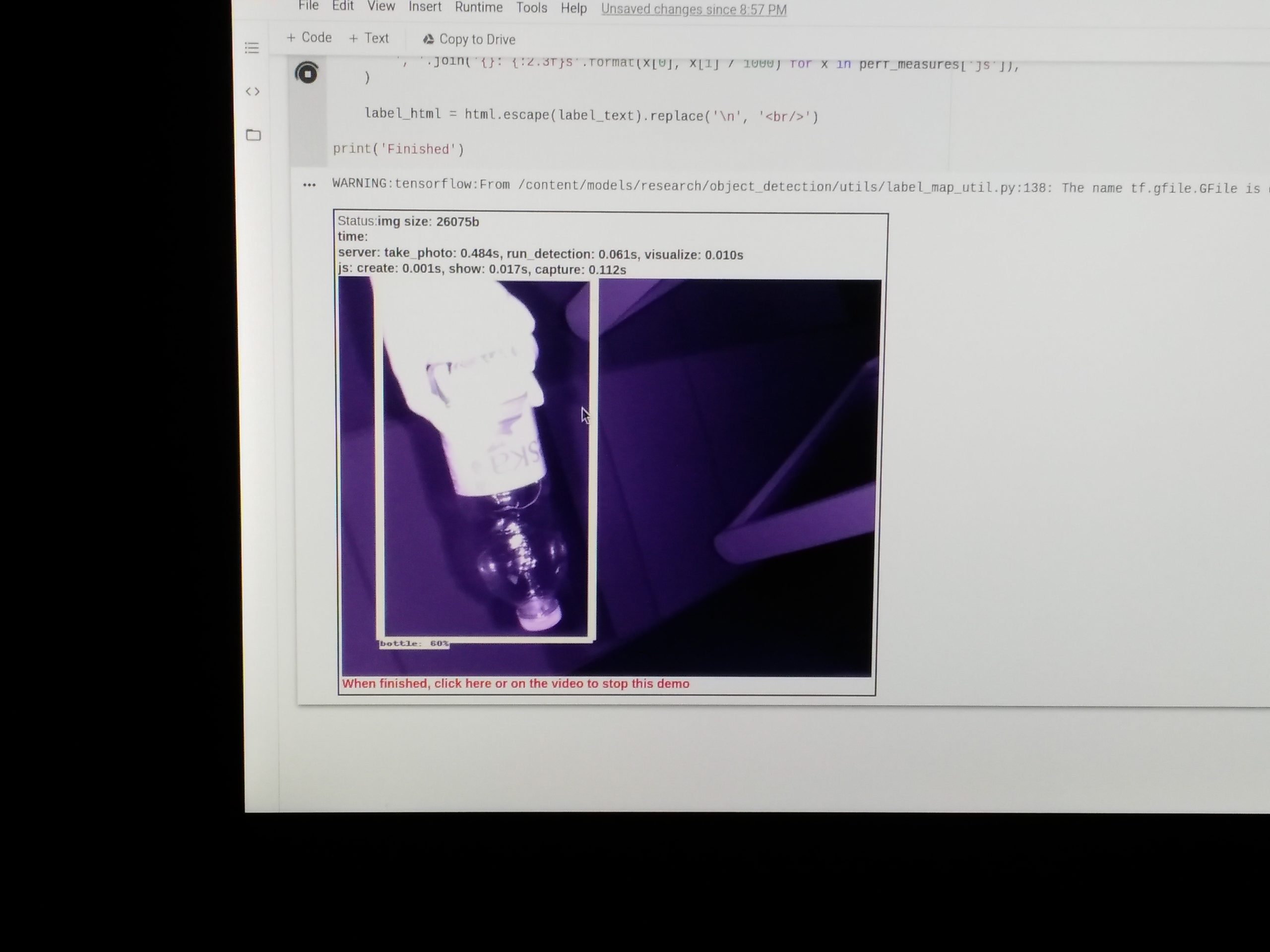
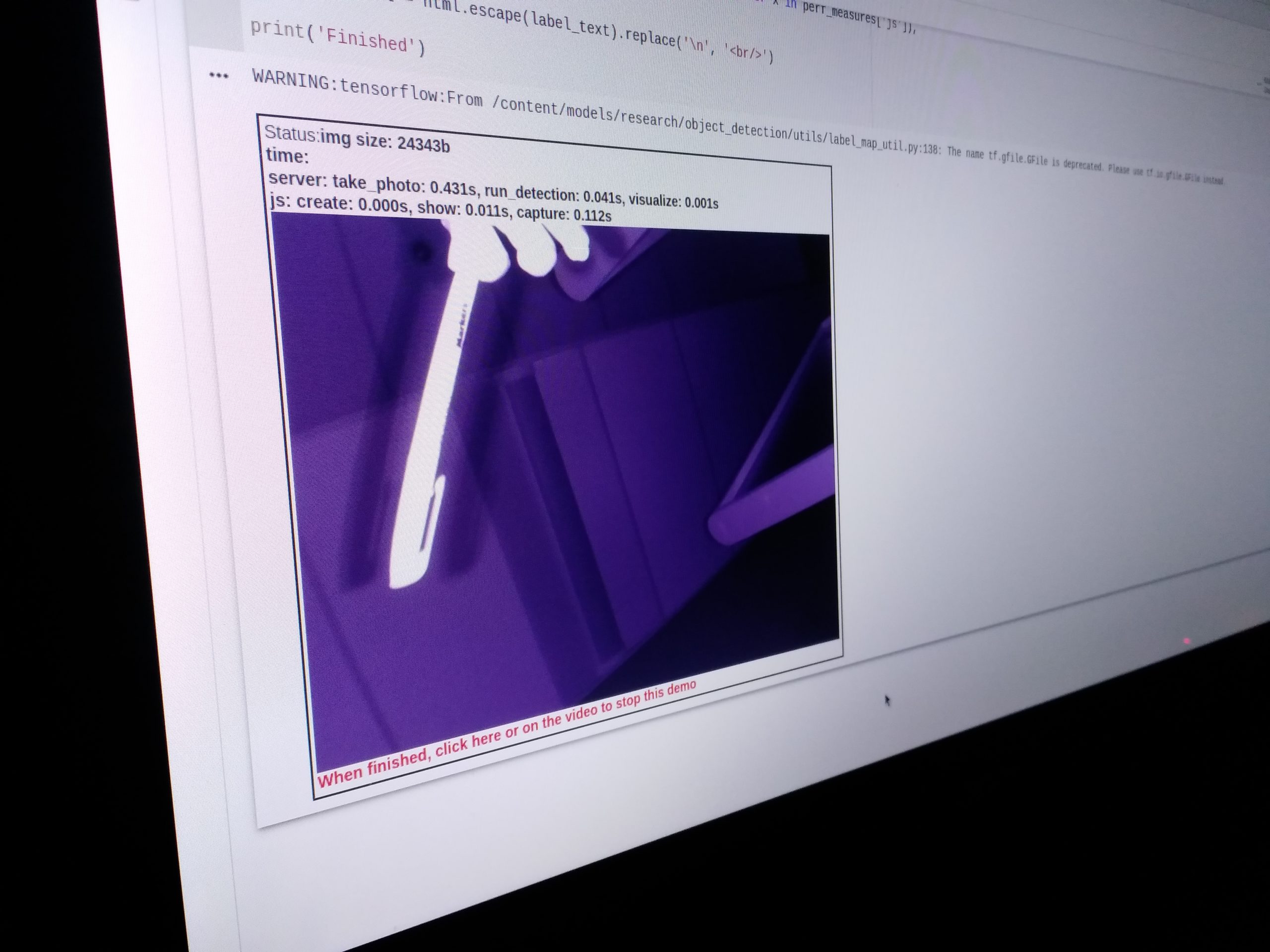
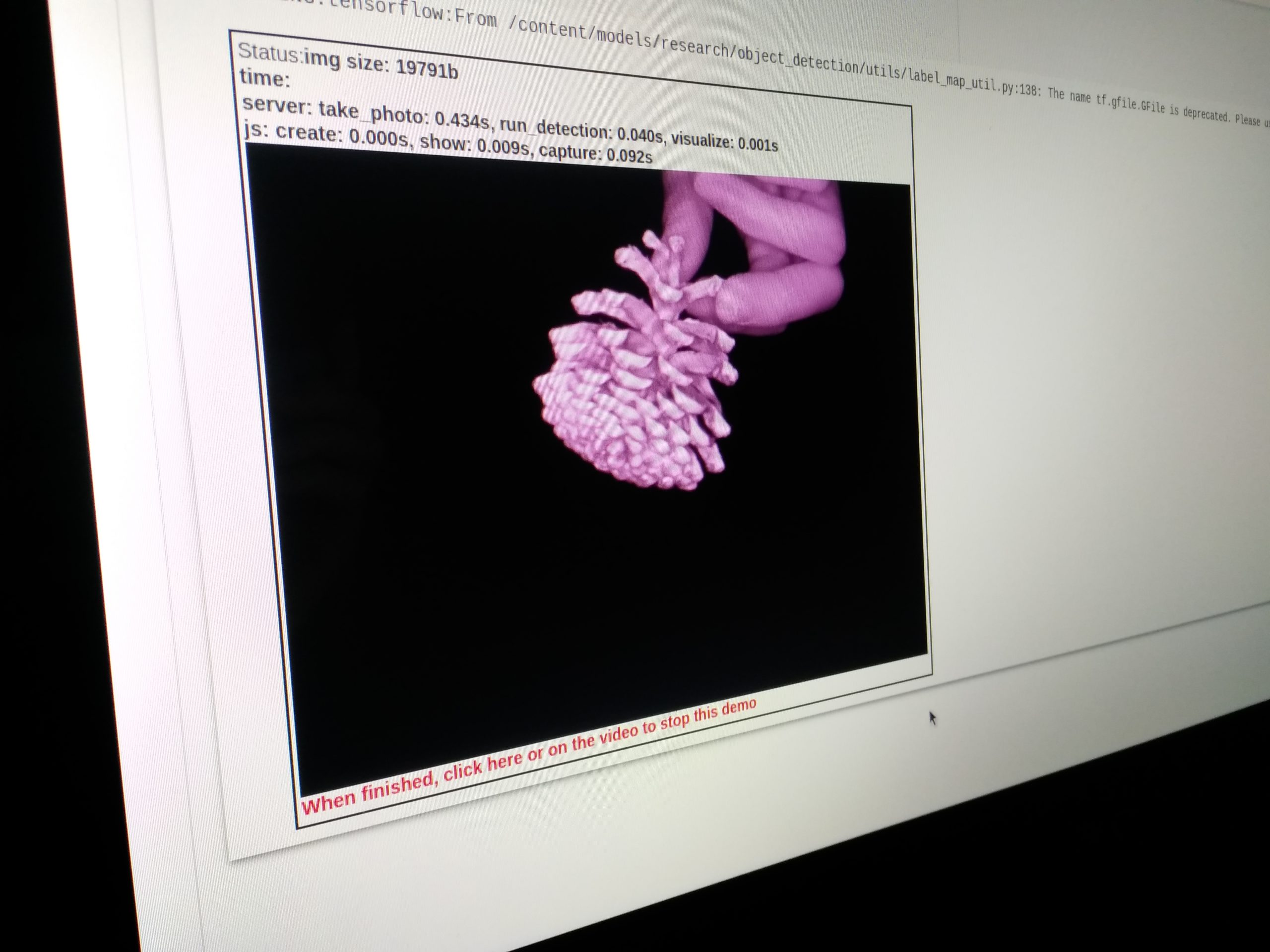
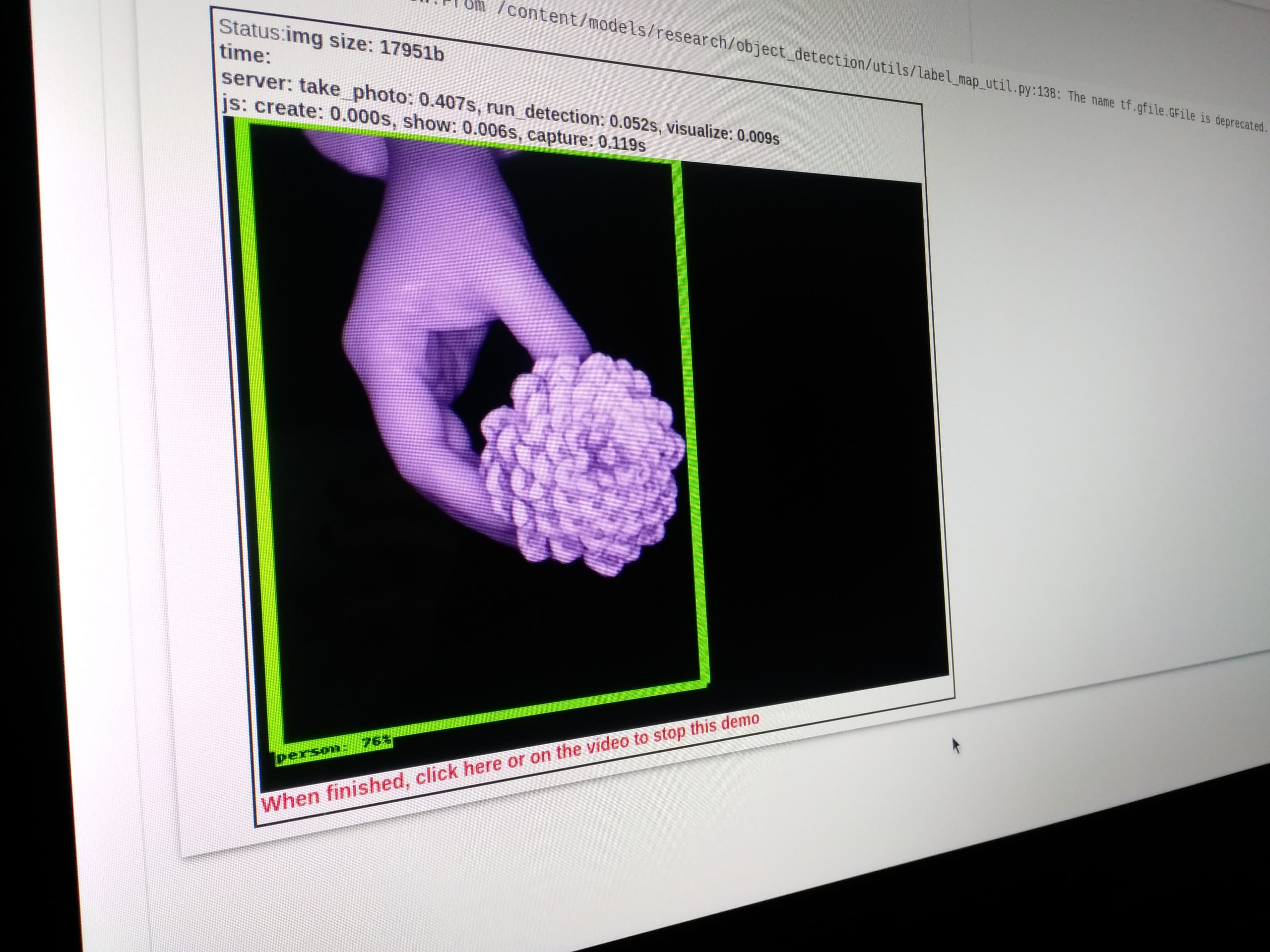
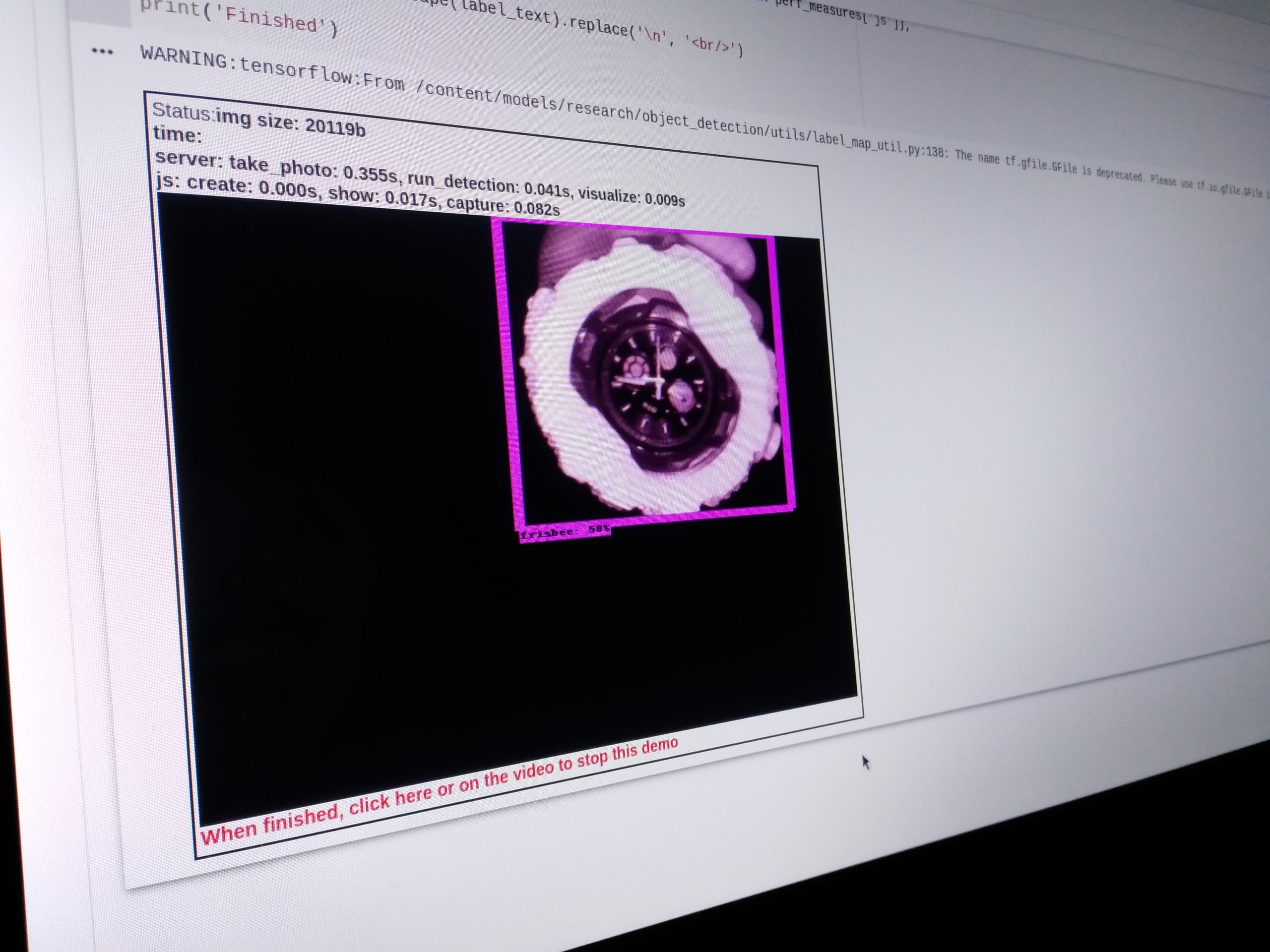
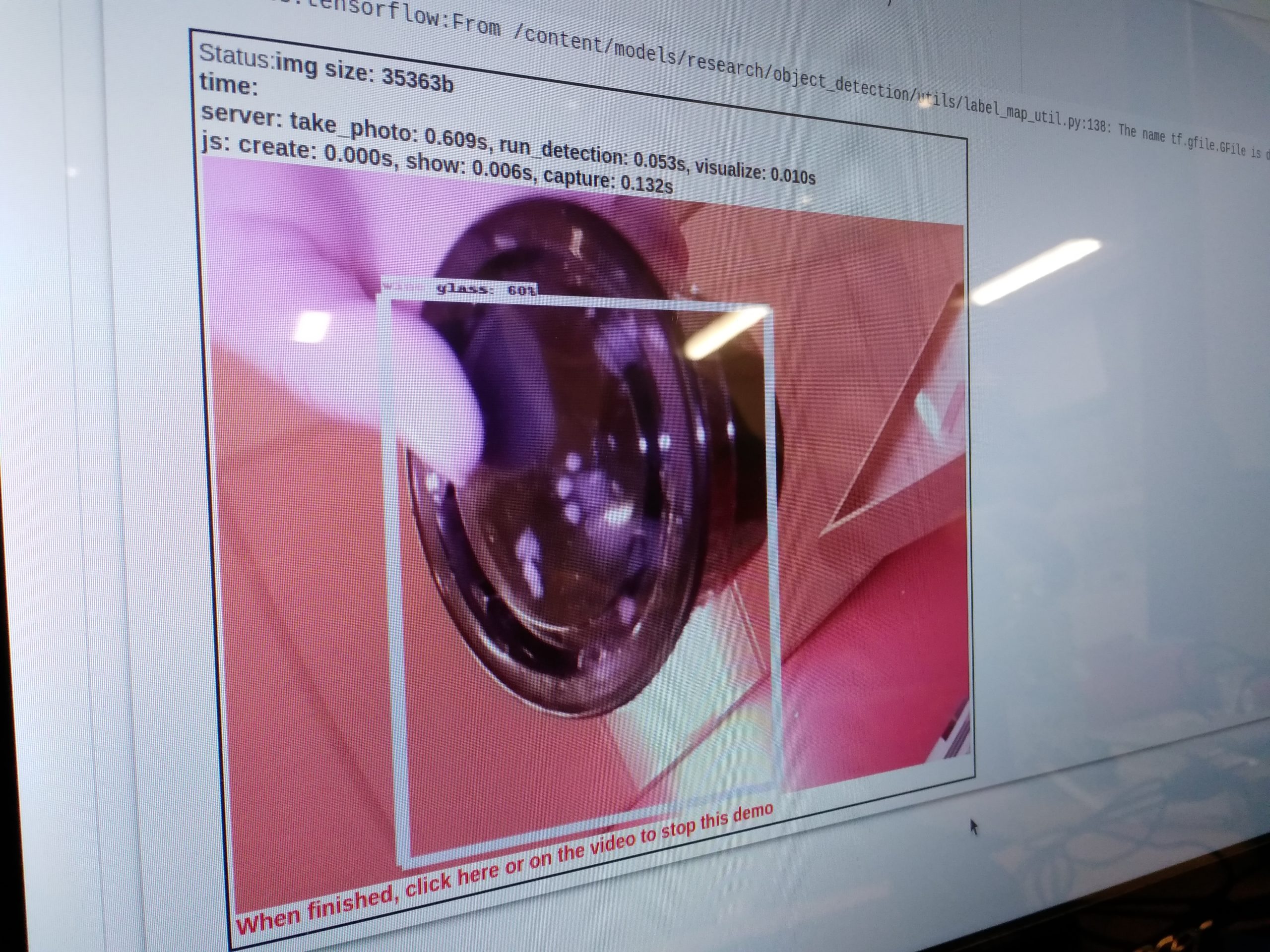
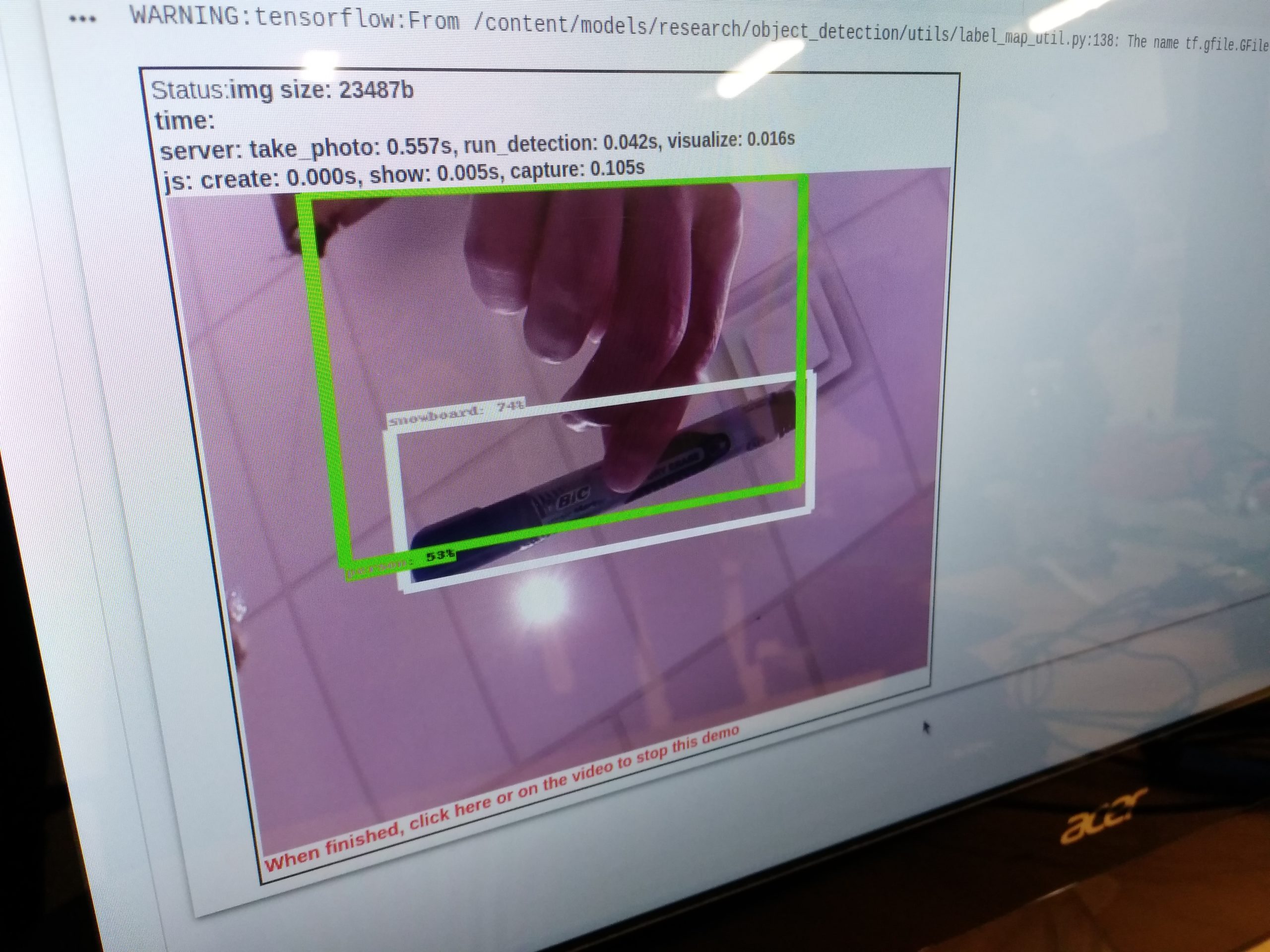
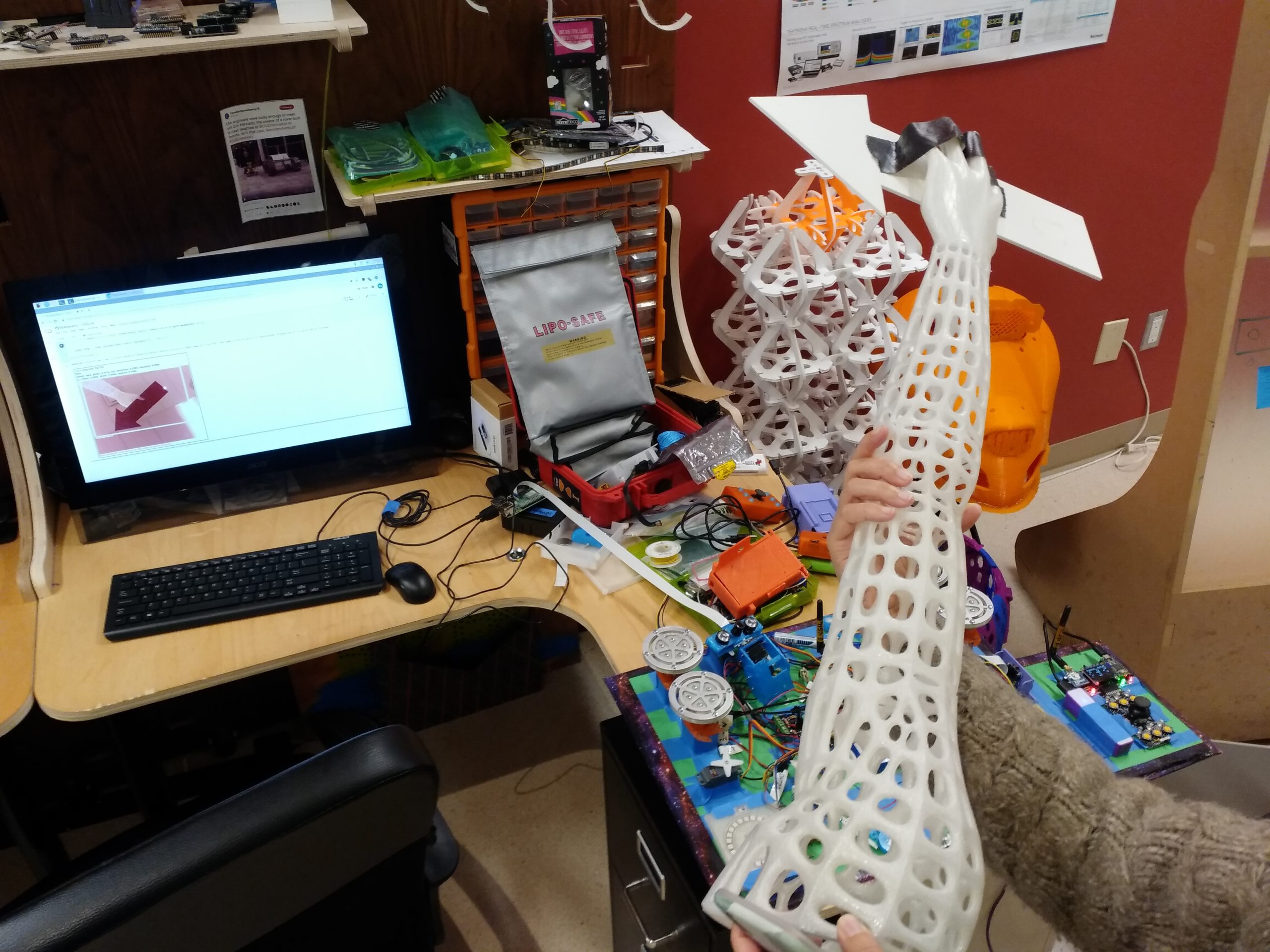
There was a good amount of progress that culminated this week!The uOttawa group got Tensorflow object detection working with the IR camera attached to the RPi! We were able to see what the objects were being detected as. This was just using the standard MobileNet model, and there were results such as surfboard in there too.
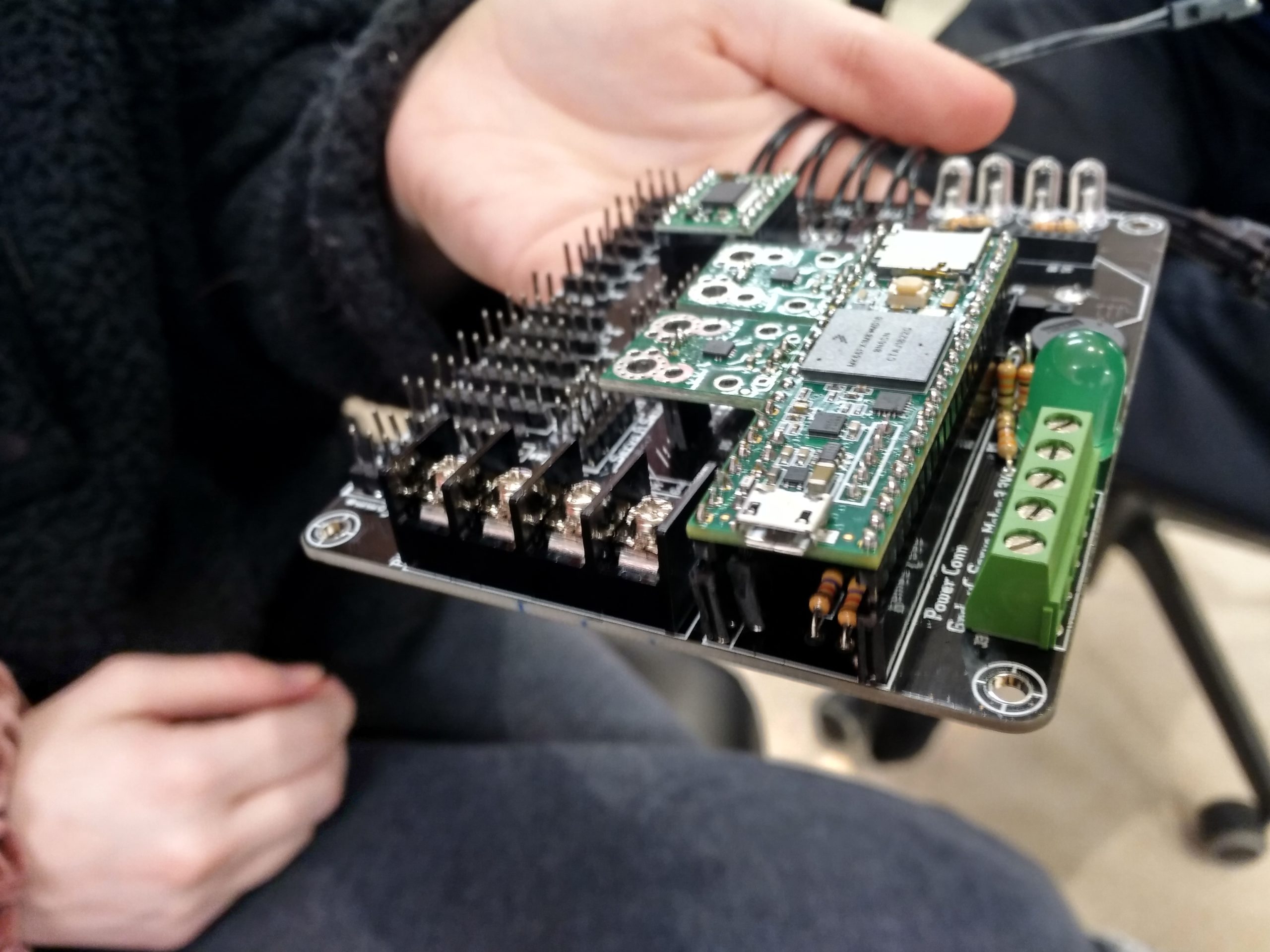
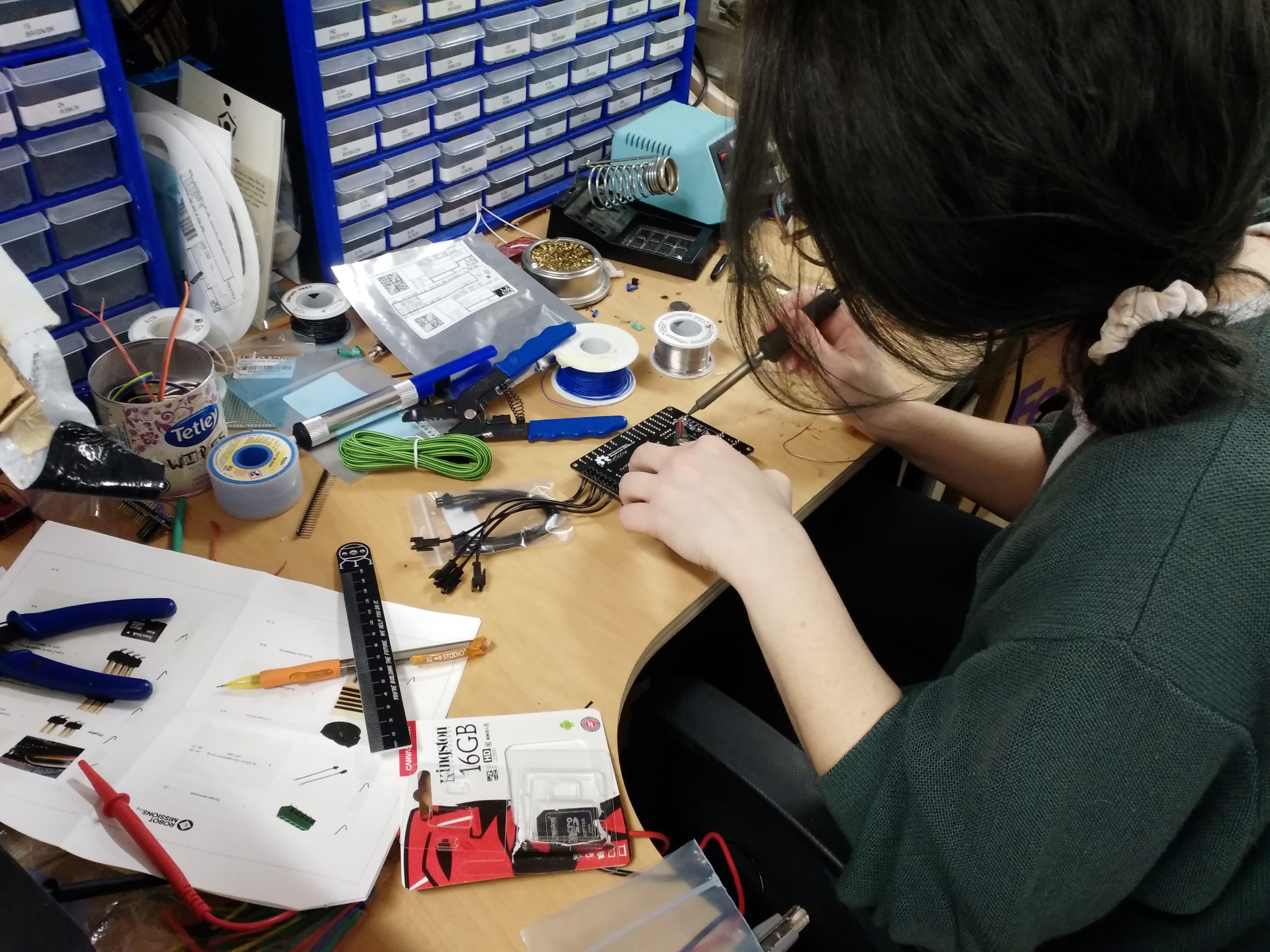
Beck completed the Bowie Brain Kit! It is now completely soldered. Next step is programming the first blink! As well, we had the chance to meet someone new, Queenie, who was interested in learning more about Robot Missions.
Hooray! It’s great to see it when progress meets a milestone. Congrats to the uOttawa team!
-

- Meeting Queenie, who’s also interested in environmental robotics

-

- Tensorflow is running!
-

- Hello! Tensorflow!
-

- Now setting up the RPi

-

- We ran into an issue with this wifi, but switched to another and it worked
-

- Beck is soldering her Bowie brain
-

- Tesnsorflow setup in action

-

- It’s working!
-

- Computer screen
-

- Computer screen closeup
-
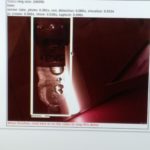
- Object detection

-

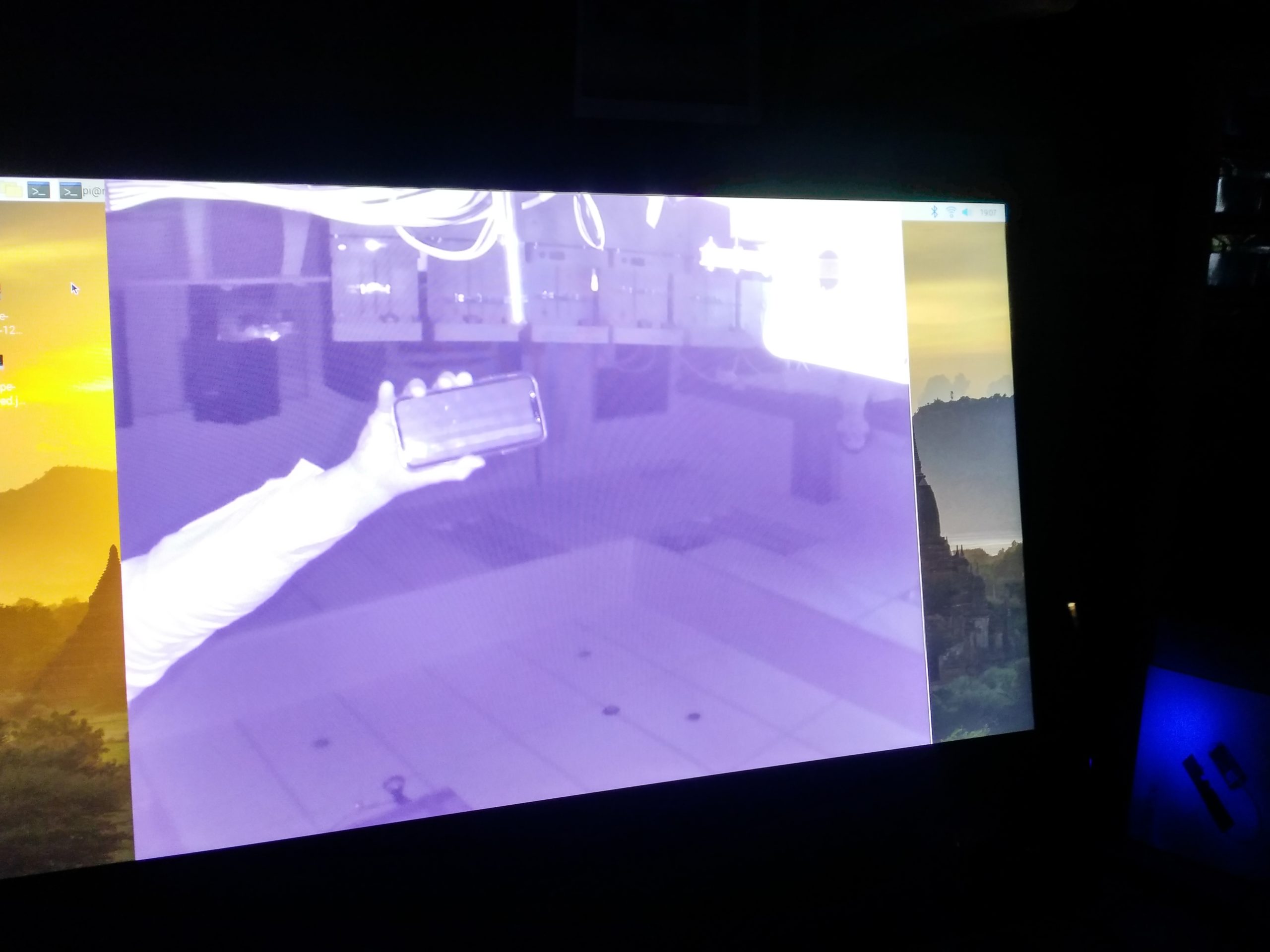
- Testing in the dark

-

- Object detection in the dark
-

- Testing another object
-

- This one did not detect
-

- Hand

-

- Pinecone
-

- Pinecone
-

- Watch
-

- Container
-

- Pen
-

- Mug

-

- Mug
-

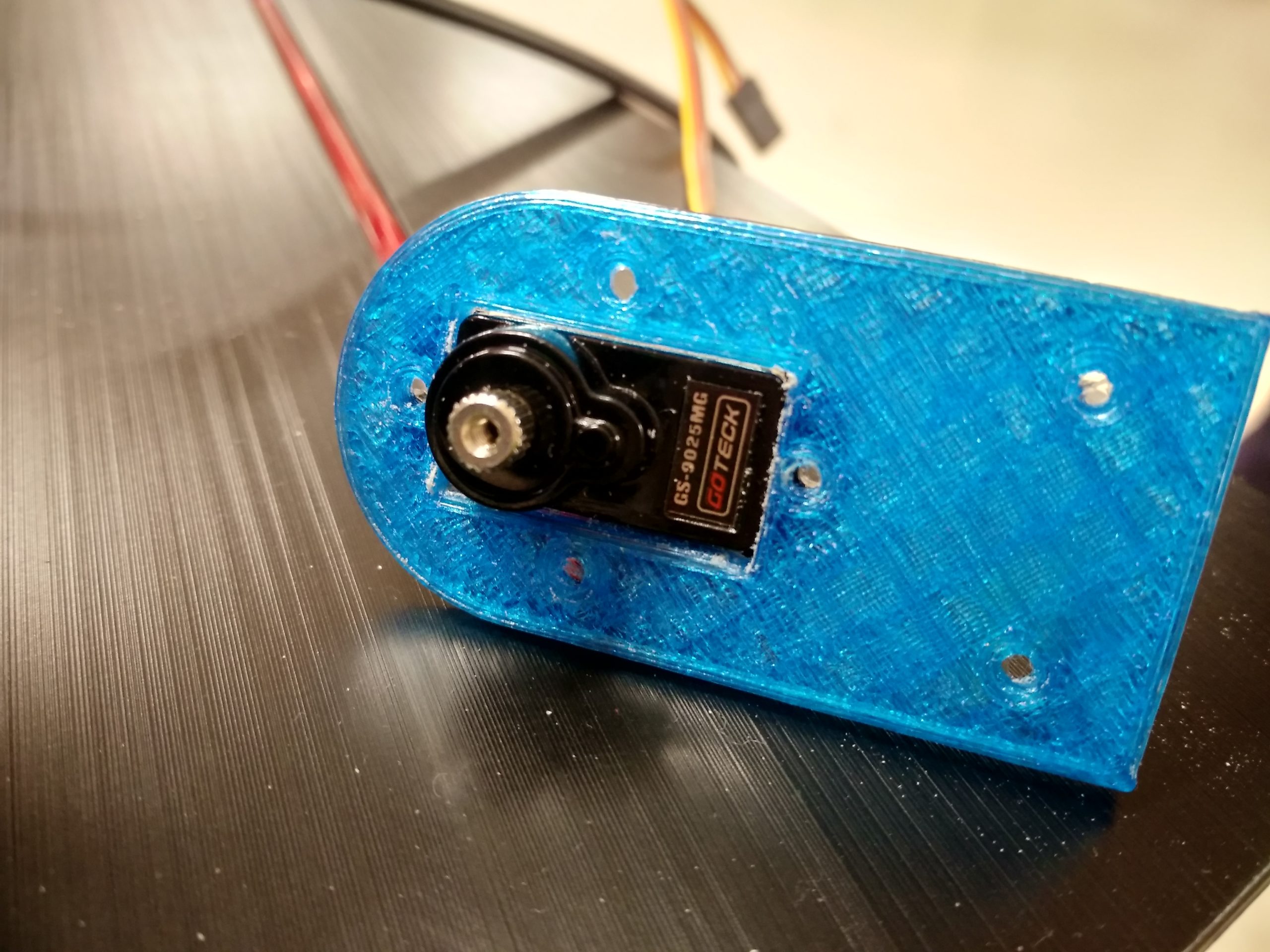
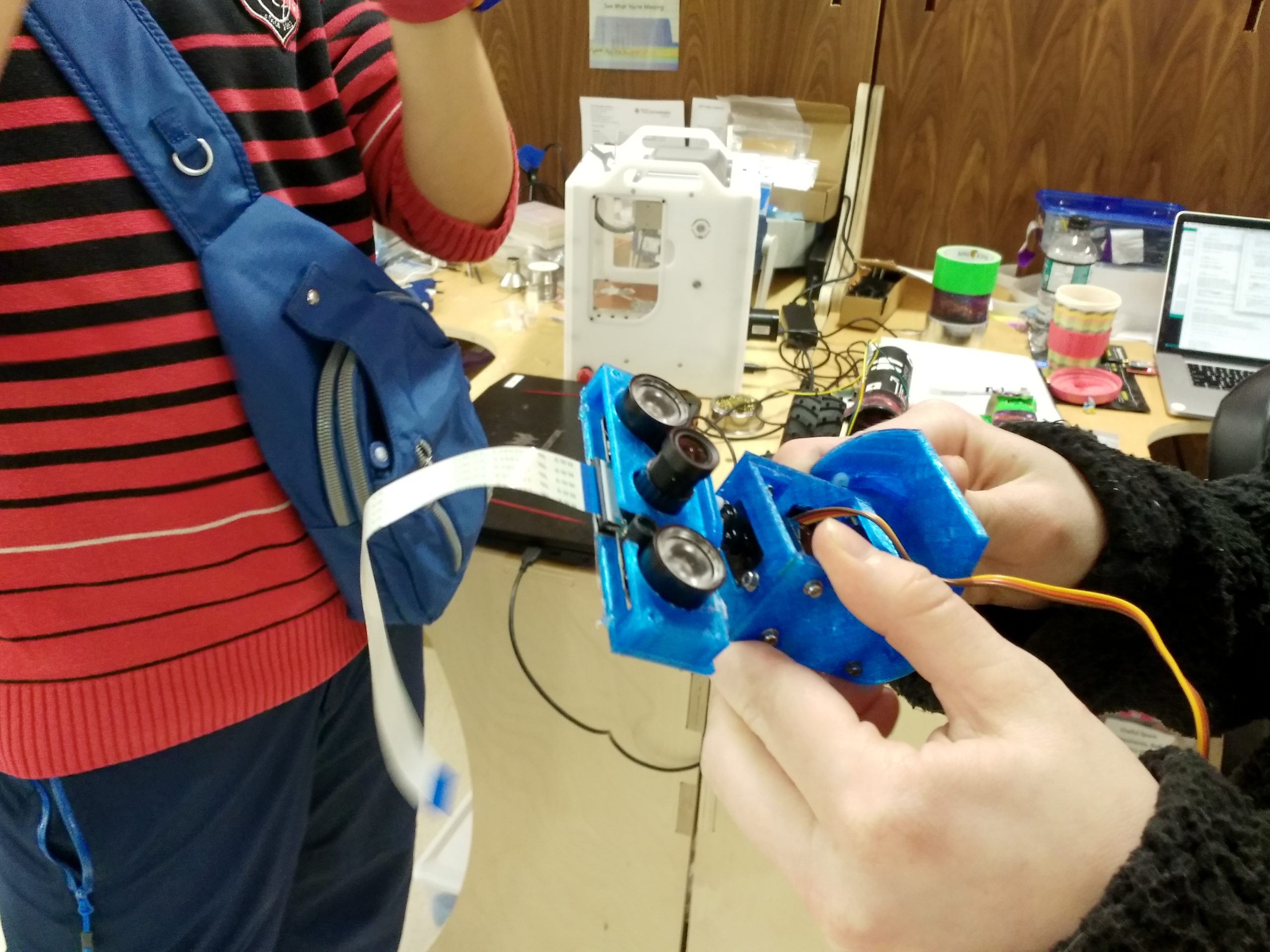
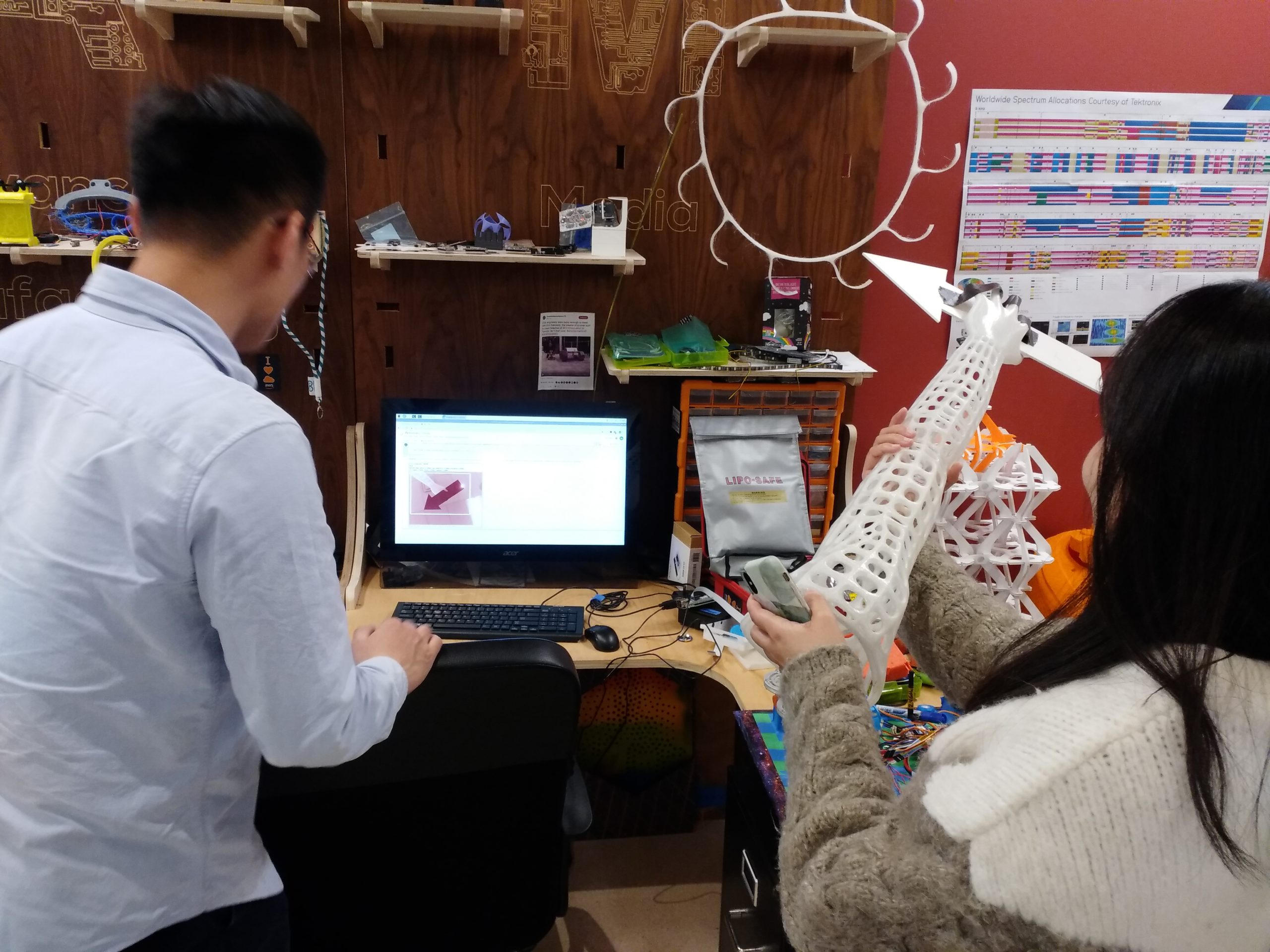
- 3D printed arm
-
- 3D printed arm
-
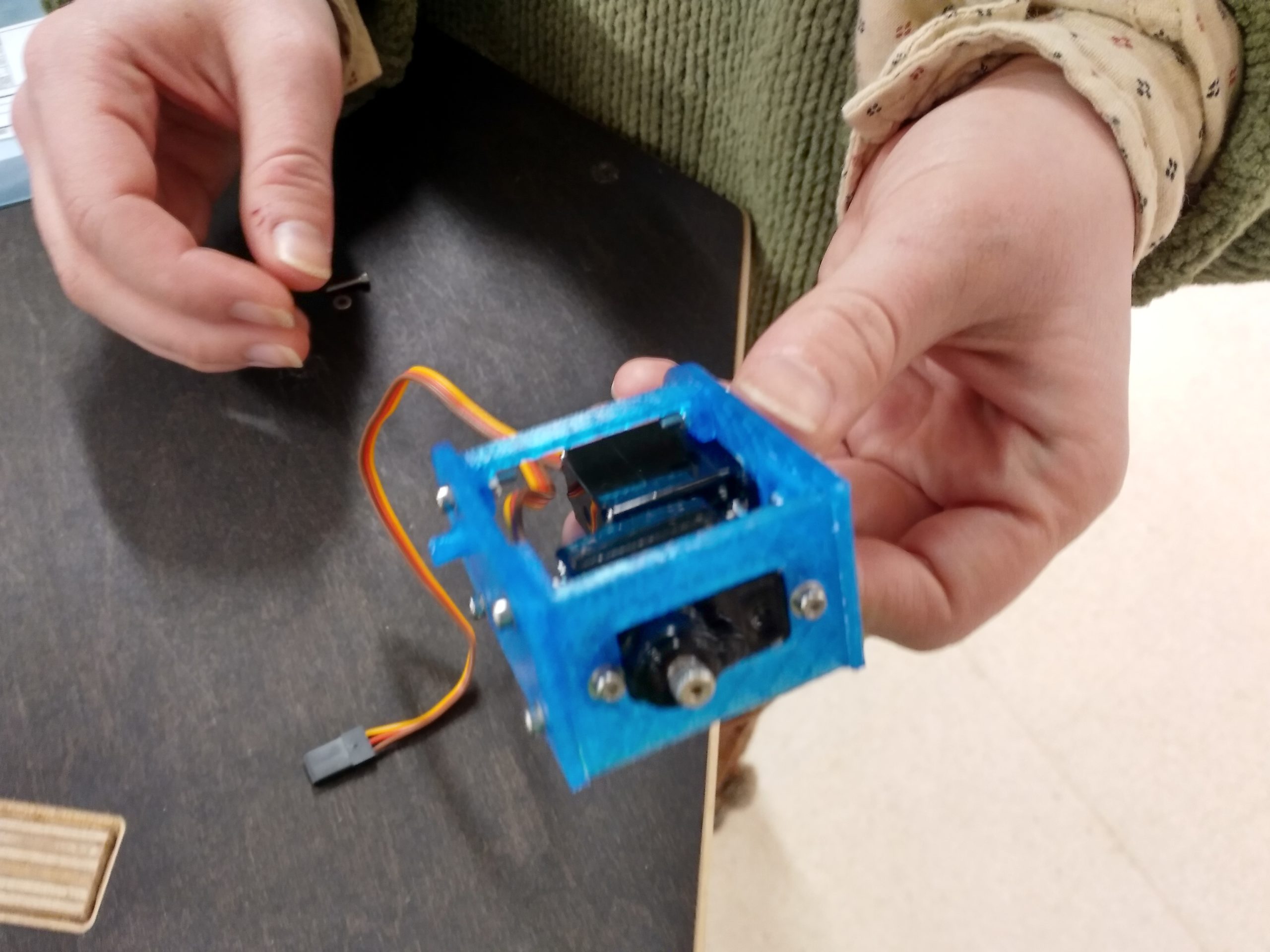
- Controlling the pan-tilt