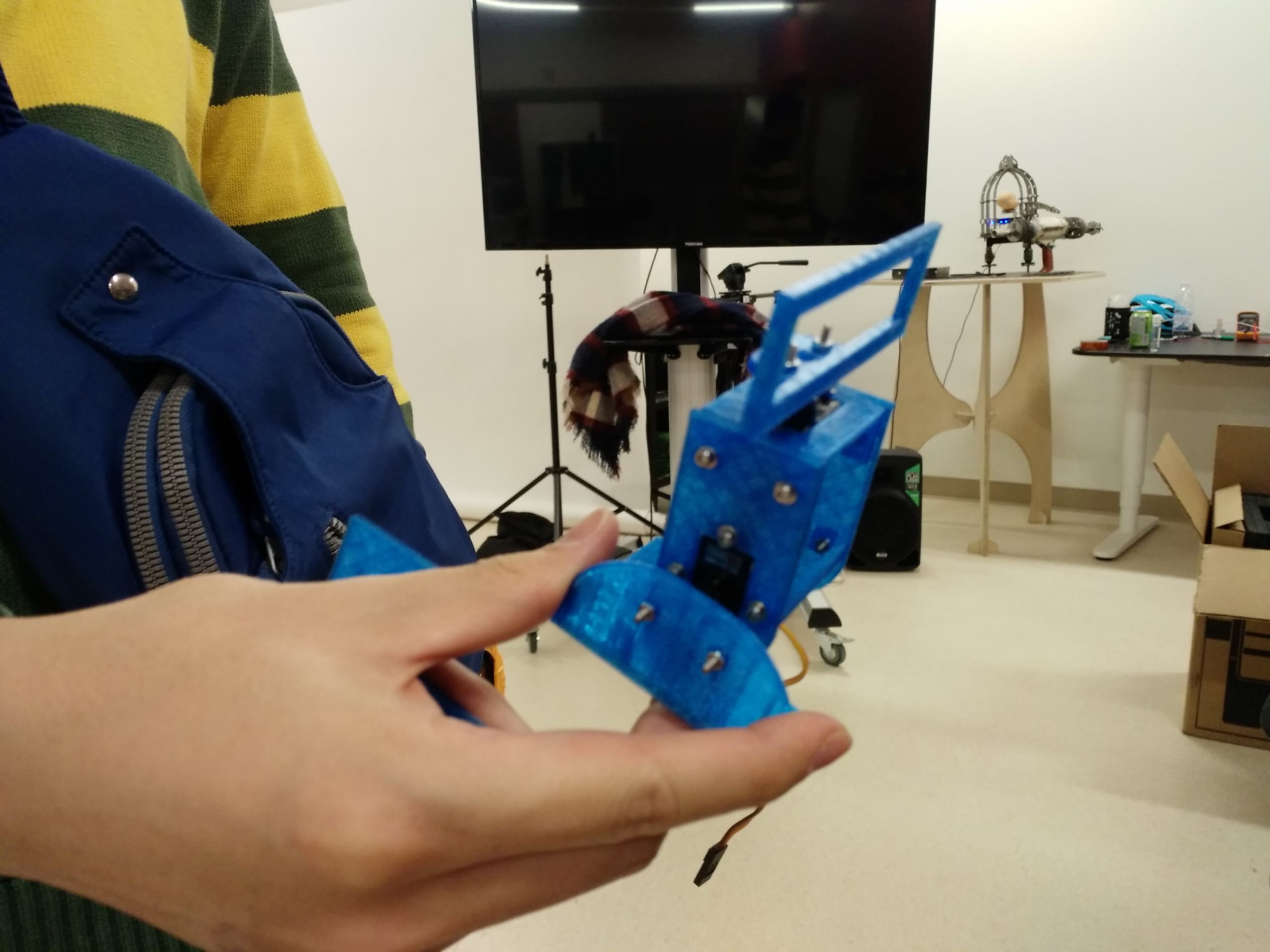
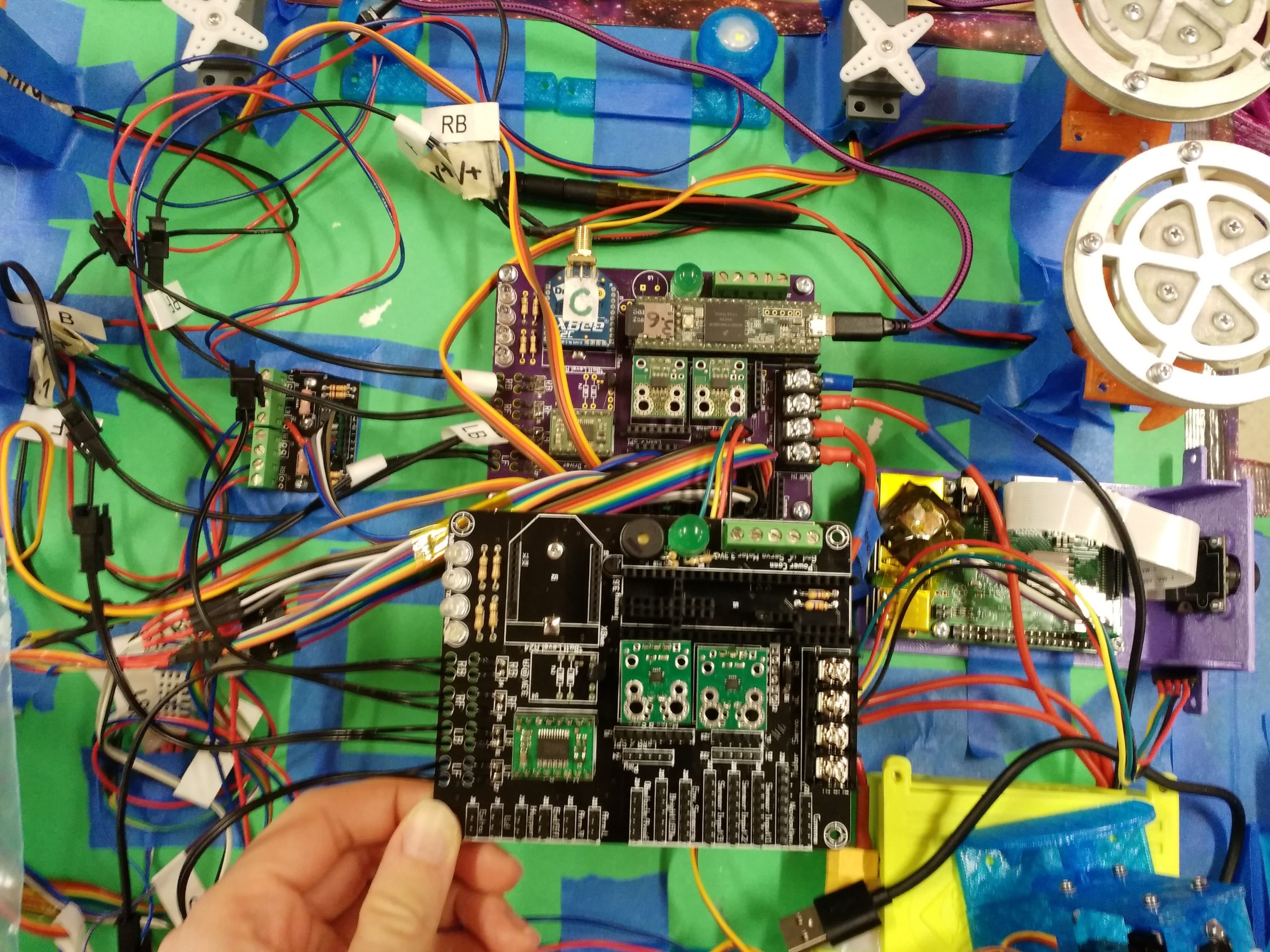
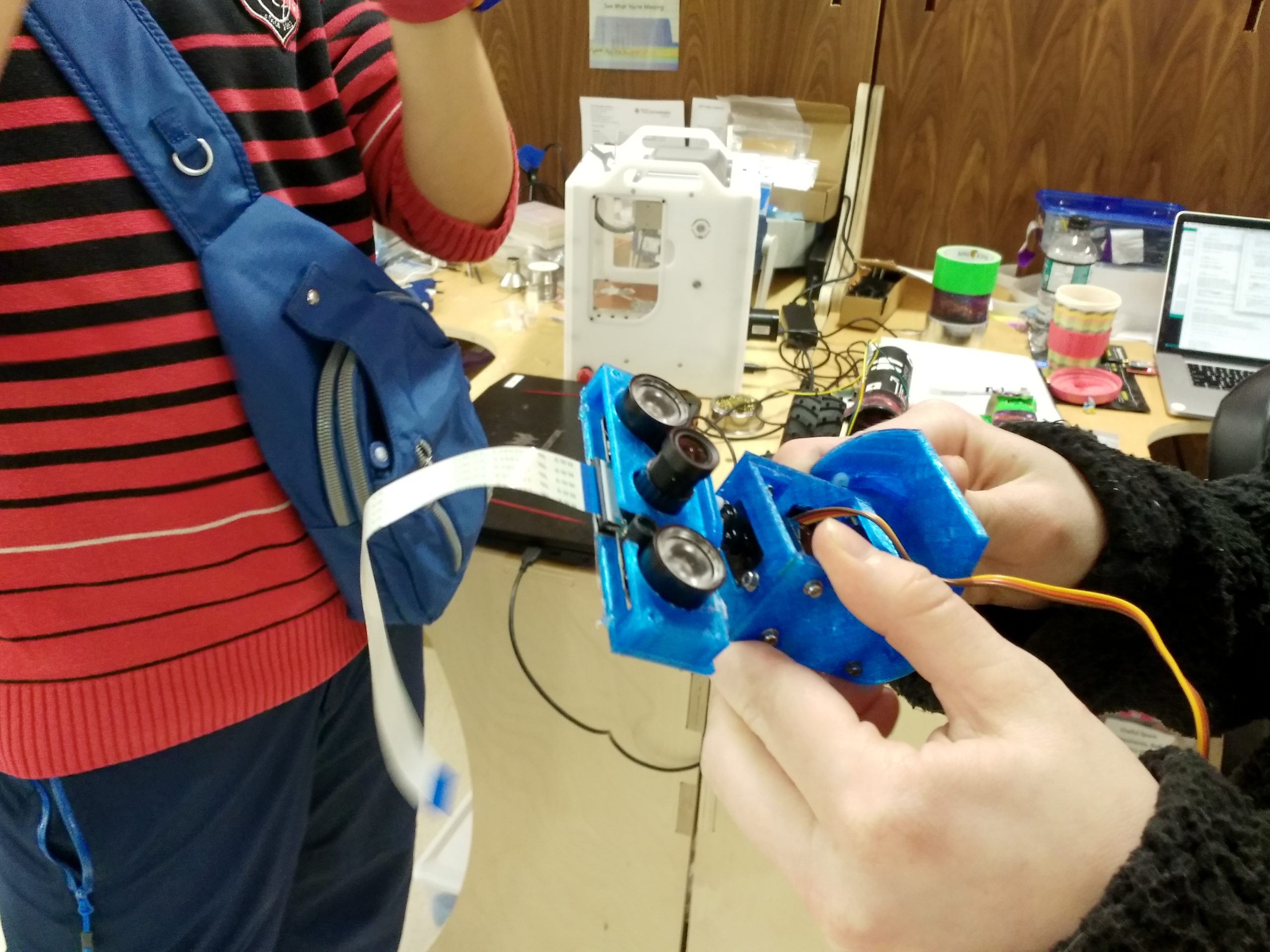
Tonight the groups continued on the progress. The pan-tilt servo connections were added to the Bowie brain board. The pan-tilt mechanism was assembled. Test code was written to make sure the pan-tilt works. Beck added the motor wires to the brain kit. It’s interesting to see how less dusty / sandy the brain is when new.
Jessica checking the pan-tilt wires
Pan-tilt assembled
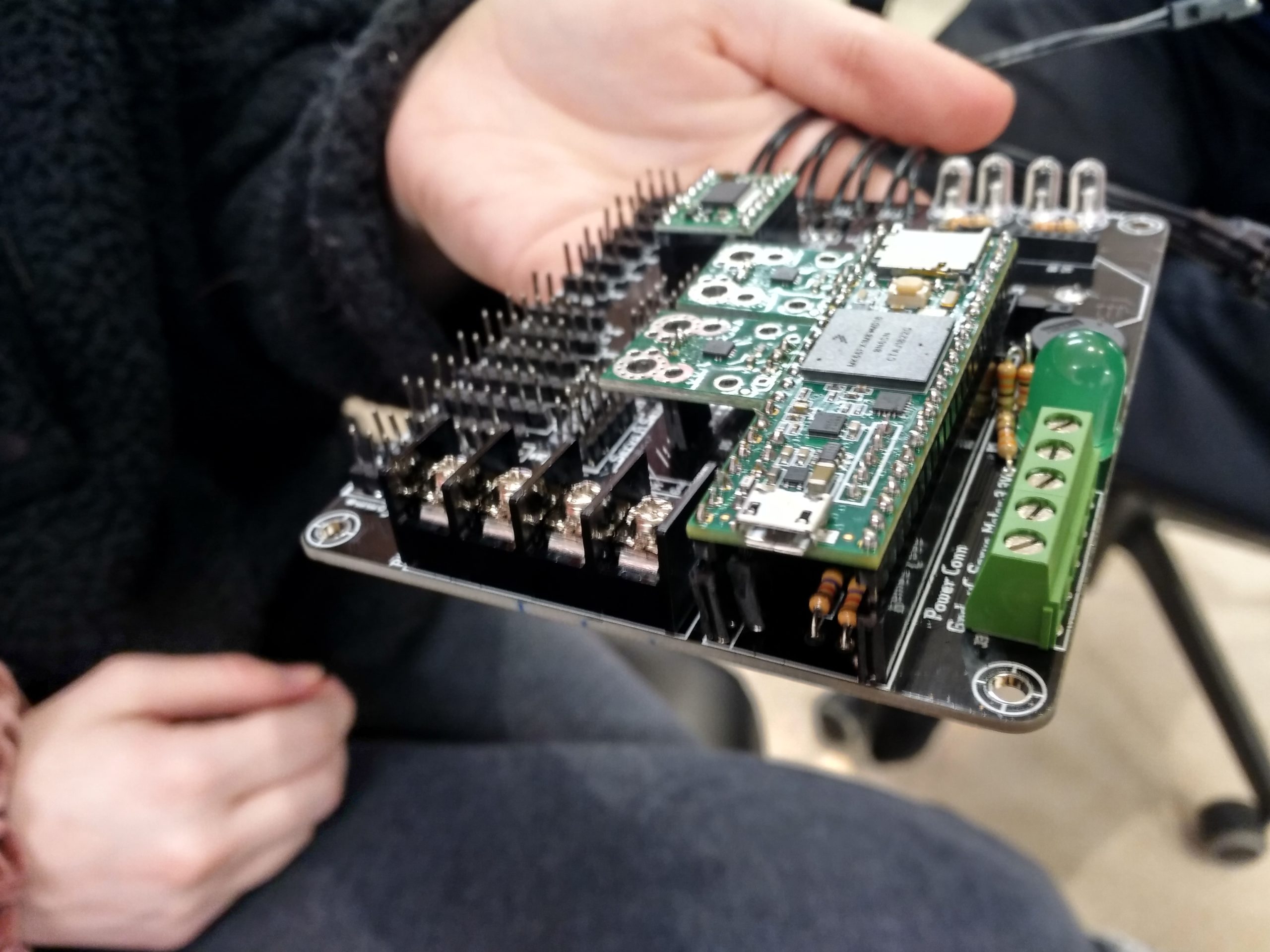
Motor wires added
Comparing the dust / sand free Bowie brain to the one that’s been in the field
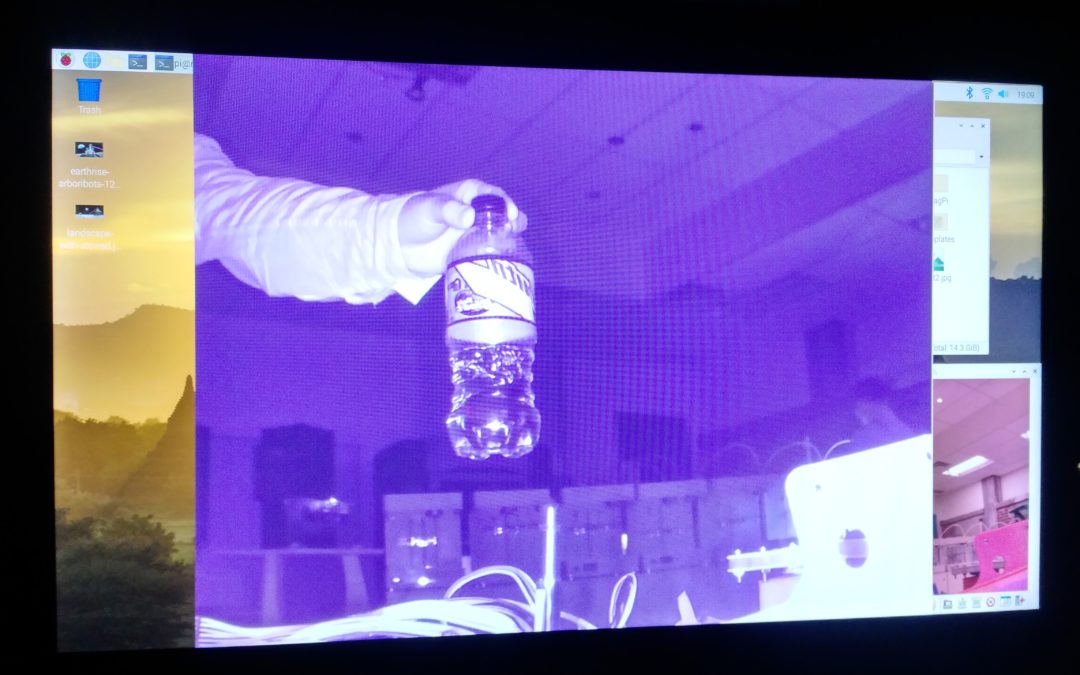
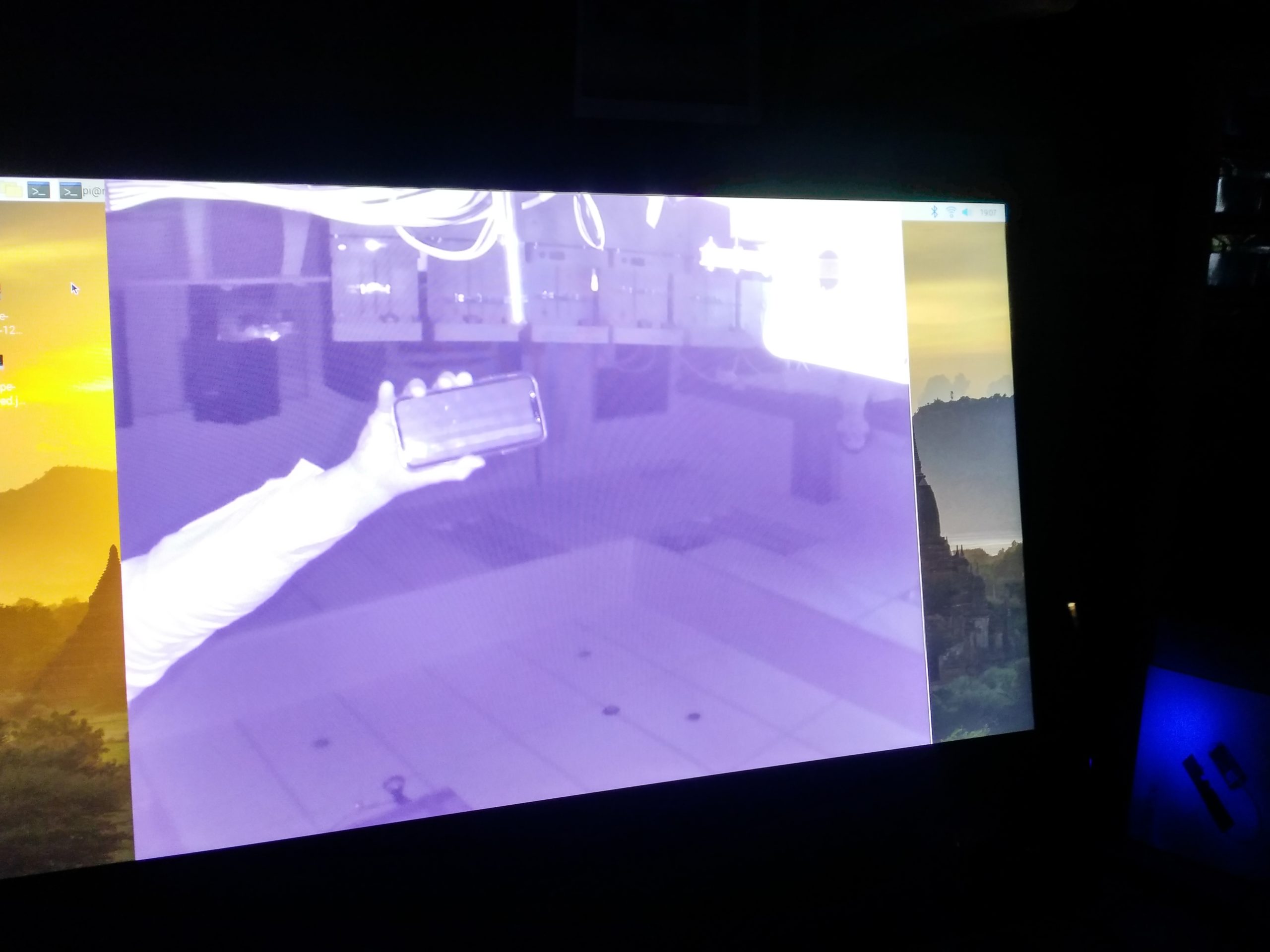
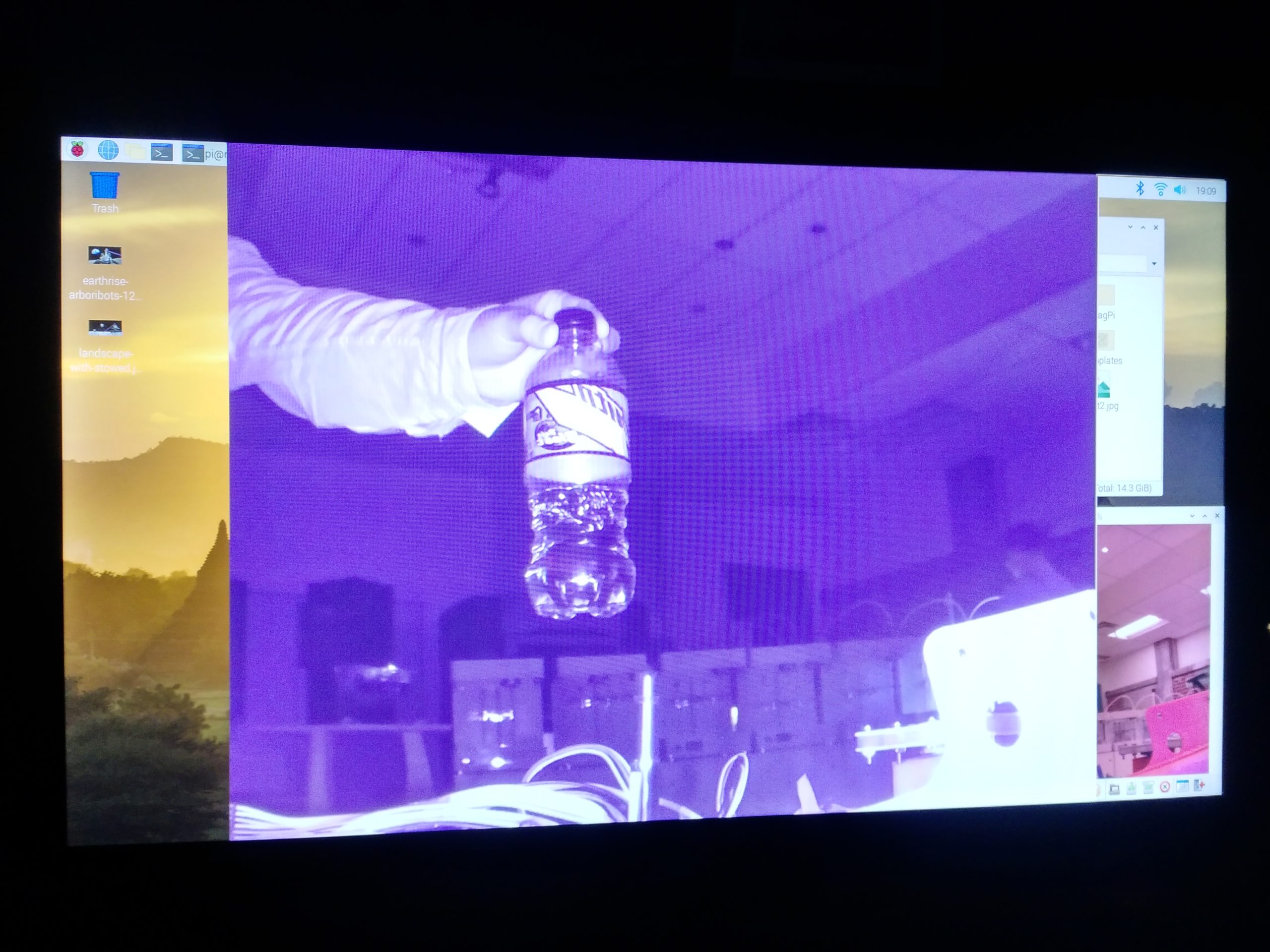
Tonight the uOttawa group tested the IR camera. They connected it to the Raspberry Pi, and took pictures with it using raspistill. The test images were showing some objects with the overhead lights on and off. The IR leds that are beside the camera do a good job at illuminating the objects when the overhead lights are off. This progress showed that the IR images can be captured, and the next step is to pass them to Tensorflow for object detection. Beck added the headers to the Teensy 3.6 and inserted it in to the Bowie Brain.
Here’s part 2 of the beta brain kit progress! Tonight Beck and Brenda were soldering many of the headers needed for this board, taking approximately 3 hours. Watch the video snippet update here
Some of the bugs found this week were:
Overview:
Might want to mention about having a micro USB cable that can do sync
Part 5, Step 16 – Rephrase 4x 5 pins, so they can all be cut at once. Had to sand F headers to fit
Part 5, Step 25 – Two right-most holes for the current sensor
Part 5, Step 26 – ‘All available pads’, not quite
They are making great progress and finding useful bugs to improve on in the instructions. I think that next week they will be pretty close to getting set with installing the Teensy and Arduino software to program the board with its first blink! Want to see part 1 of the progress? Check it out here
We met with some of the Master’s engineering design group again. Tonight, they performed benchmark analysis on Bowie the robot. We also discussed in depth the tradeoff predicament version 1.0 of the robot is at with regards to the power of the motors. It was great that they were attentive and understood. We watched some of the videos of the testing of the robot in Summer 2018 to analyse some of the timing of the turns and going forward. At the end, we went through the photos of all 23 iterations of the robot. This was the last piece of project management work – next week is design time!
We met with the University of Ottawa Master’s Engineering Design project team tonight, where we showed them a tour of the Prototyping Lab at Bayview Yards and discussed their project plan. We tried to determine what resources we might need for achieving all aspects of the project plan.
The group is super curious about the robot, and robotics in general. Their module will be useful, to see if IR light is useful in detecting plastics. It will be interesting to try it both in the day, and at night.