Kit Log #013: Operator interface assembly
There is progress being made on the operator interface assembly right now. Currently the display is completed. In the next few hours (after posting this brief log) will be the final steps on the keypad assembly. We received the components today which was a relief, in order to be able to document this tonight.
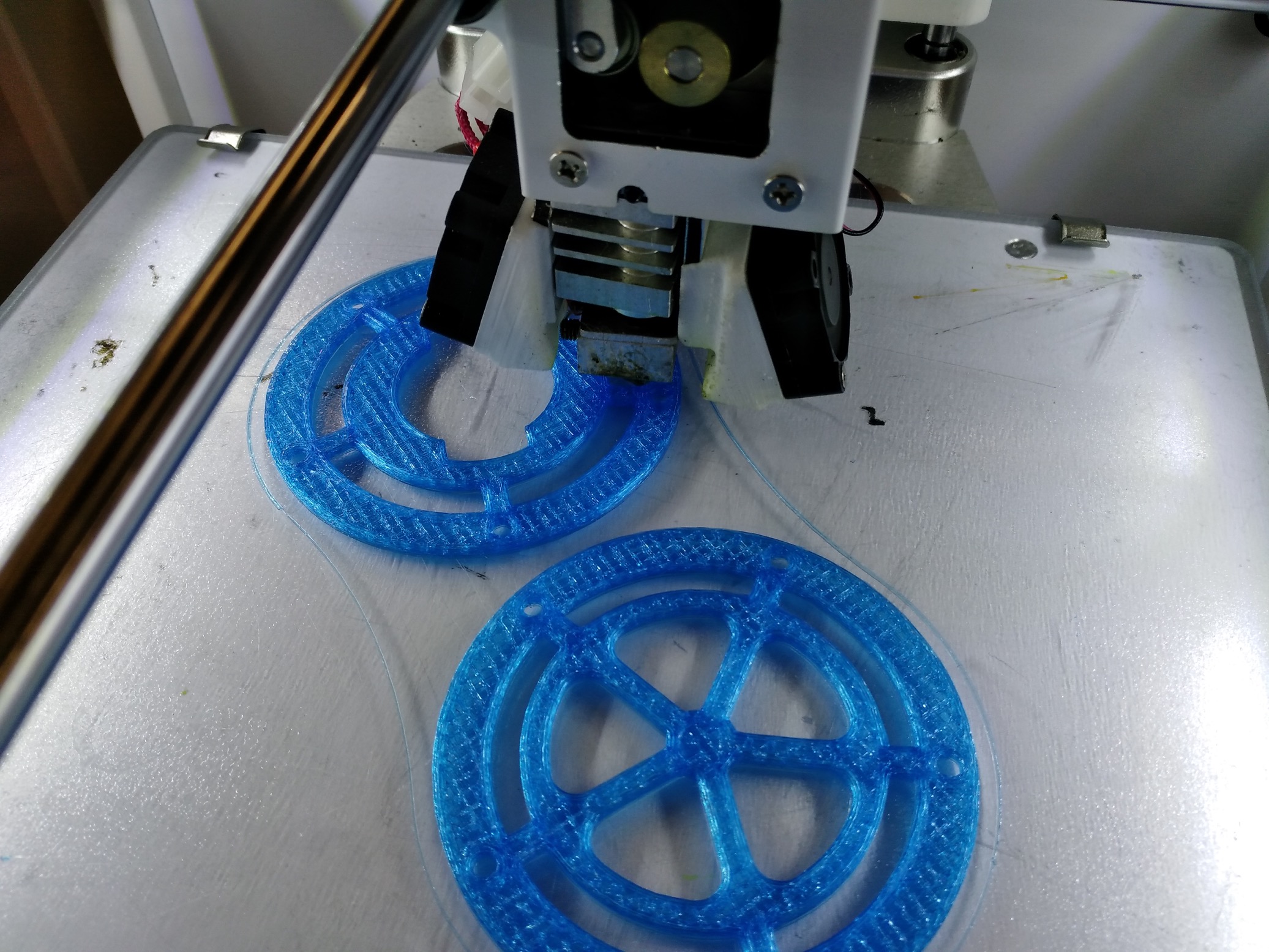
As for the motor kit, instead of the metal pieces we are increasing the disks from 2.5mm and 1.5mm to 3.0mm. This should add some more strength to it, while keeping it accessible via 3D printing – which is one of the main points of this Bowie robot in the first place. Looking at the CAD model, there should be enough clearance for a 16mm screw to have enough space at the end for the hex nut.
-

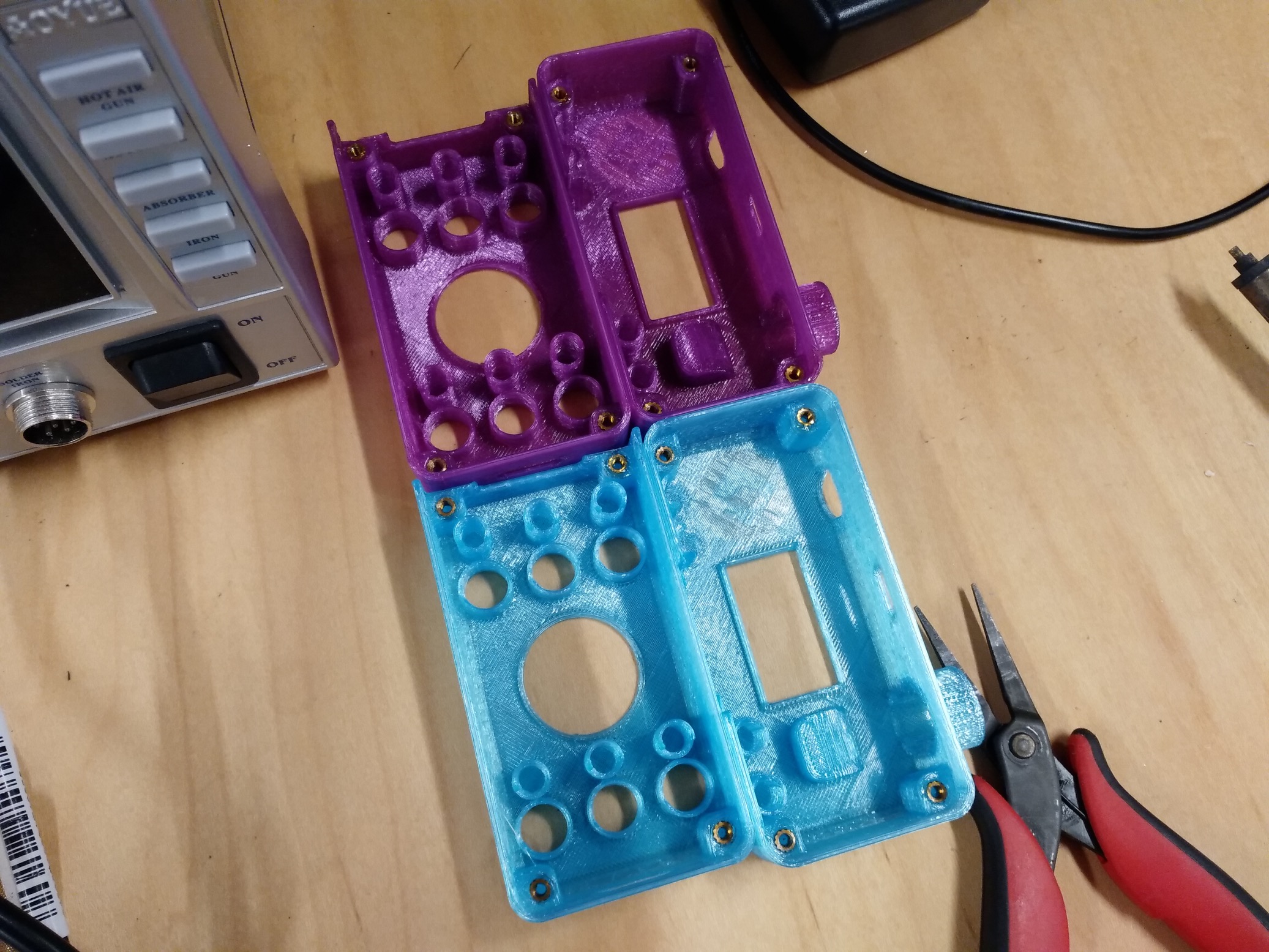
- Adding the heatset inserts to the enclosure
-

- In the process of organising the parts for the kit

-

- Checking alignment of heatsets with boards

-

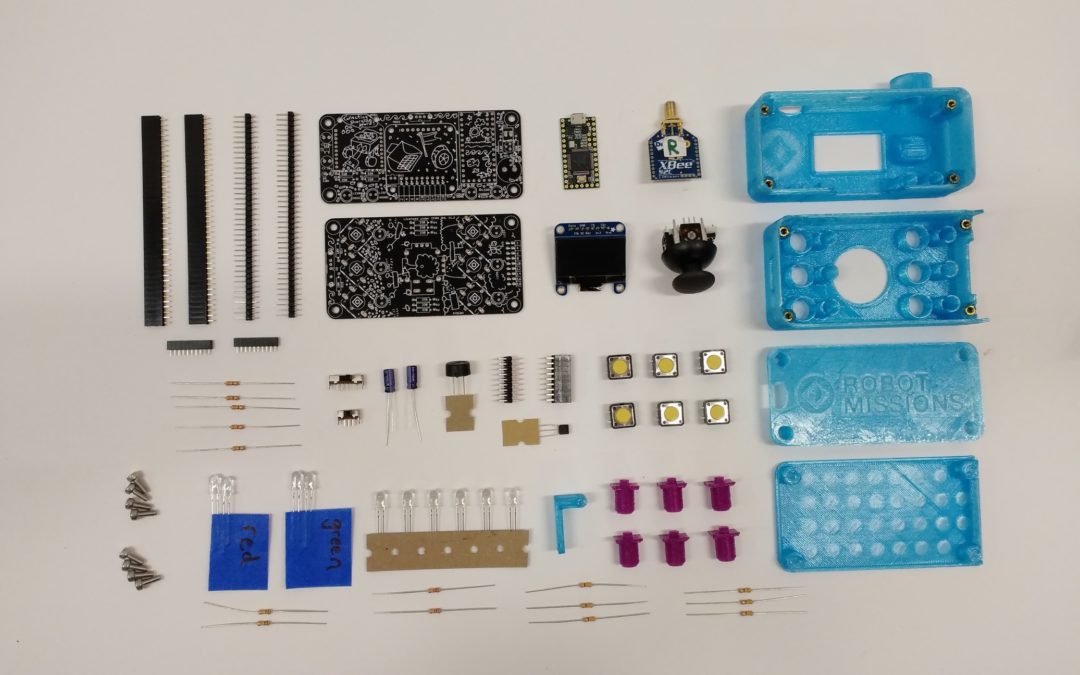
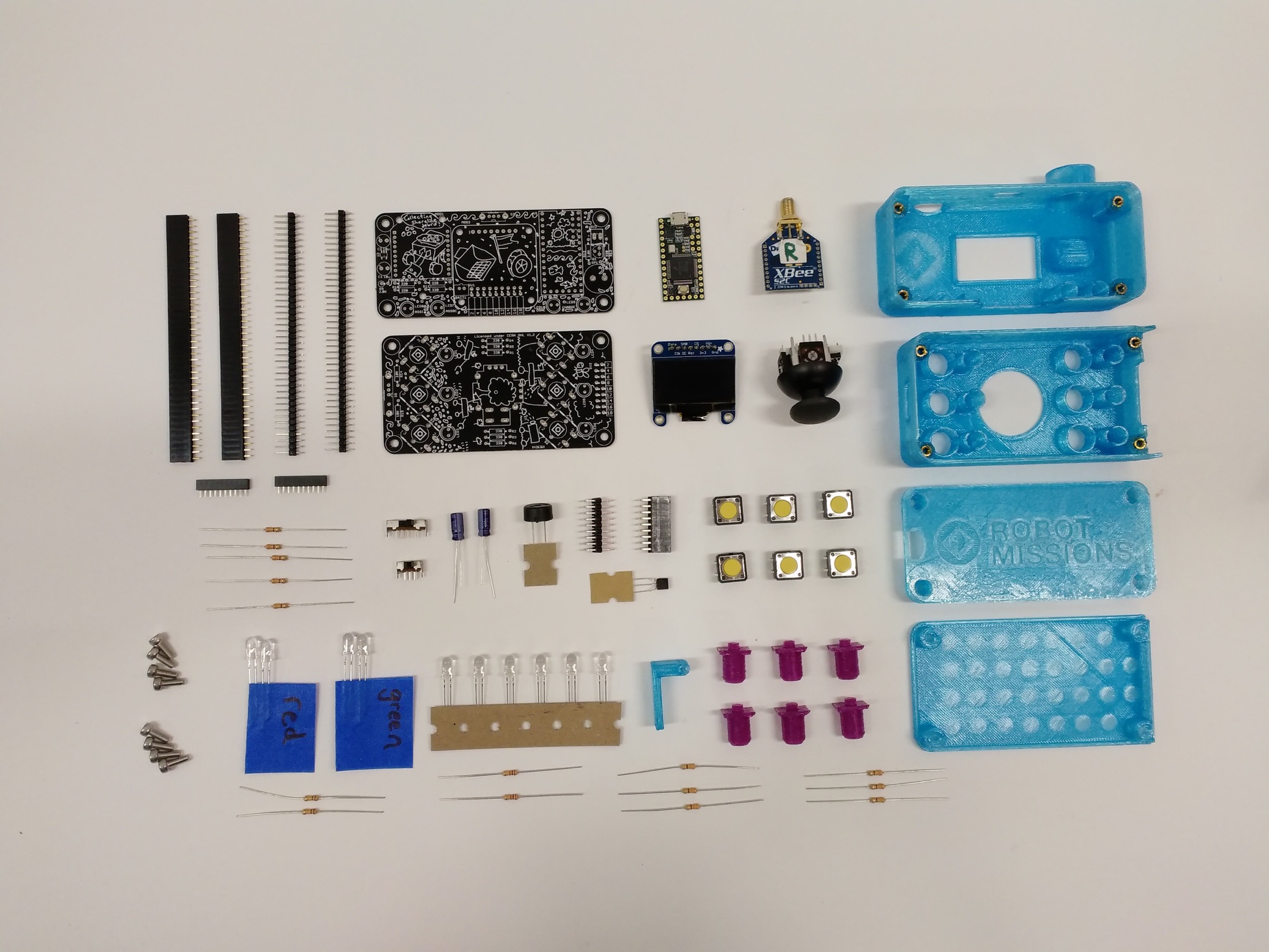
- Components in the operator interface kit
-

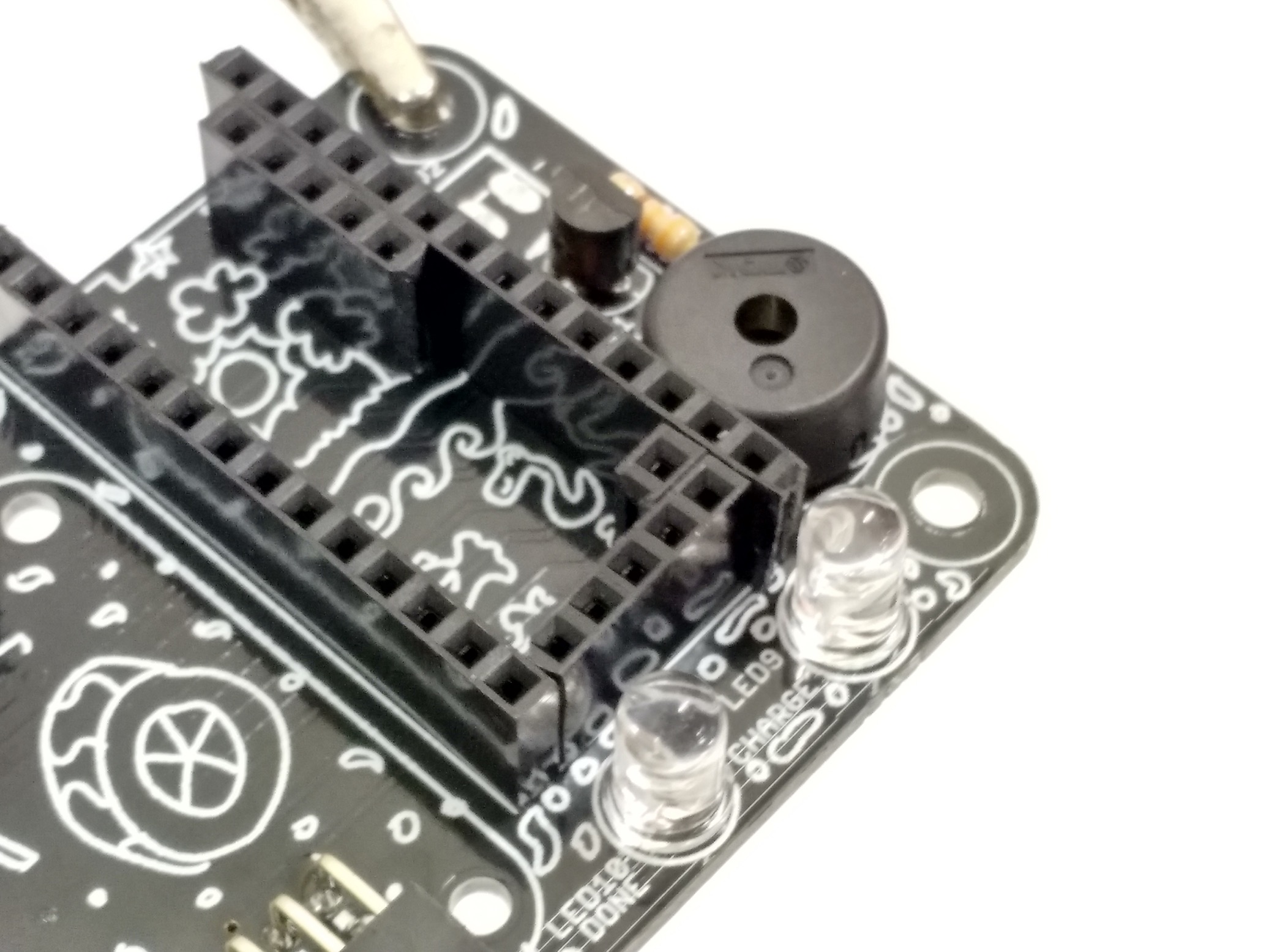
- Starting the assembly process

-

- That is a 1 pin header in the corner
-

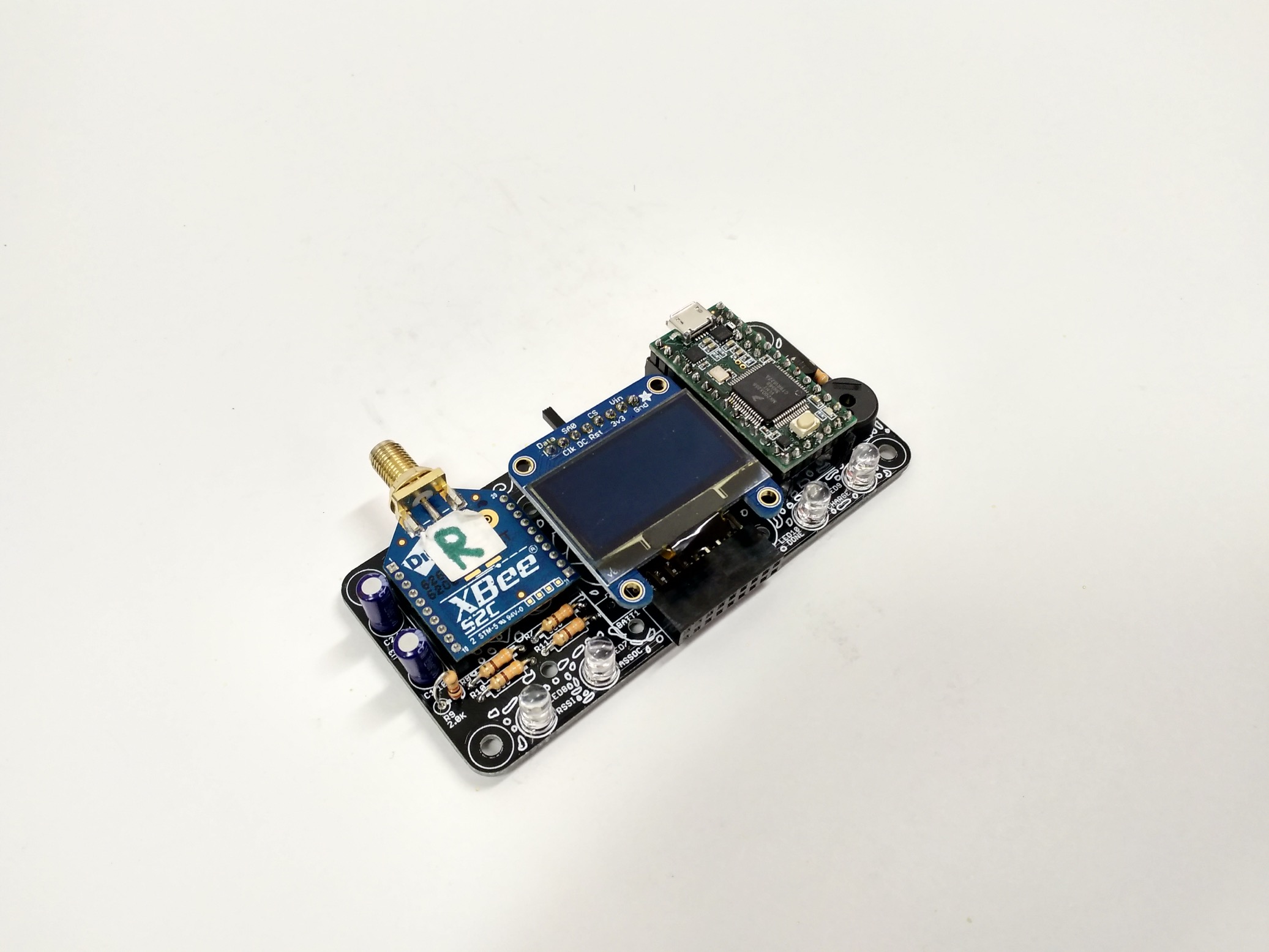
- Now to add the xbee, display, and teensy

-

- Assembled!
-
- The thicker wheel plates are printing
-

- Continuing work on the keypad next

What took up the most time so far tonight was the heatset inserts. The enclosures were previous versions without the proper hole dimension for the inserts. There’s also not enough clearance for the soldering iron tip tool to press the insert in without damaging the neighbouring walls. Finally, once the heatsets were in, then realised they weren’t aligned, so had to go back and attempt to manually align them with the circuit board. This will all be simpler with the updated version printed.
Now it is time to get back to assembling the operator interface keypad.